RUSH
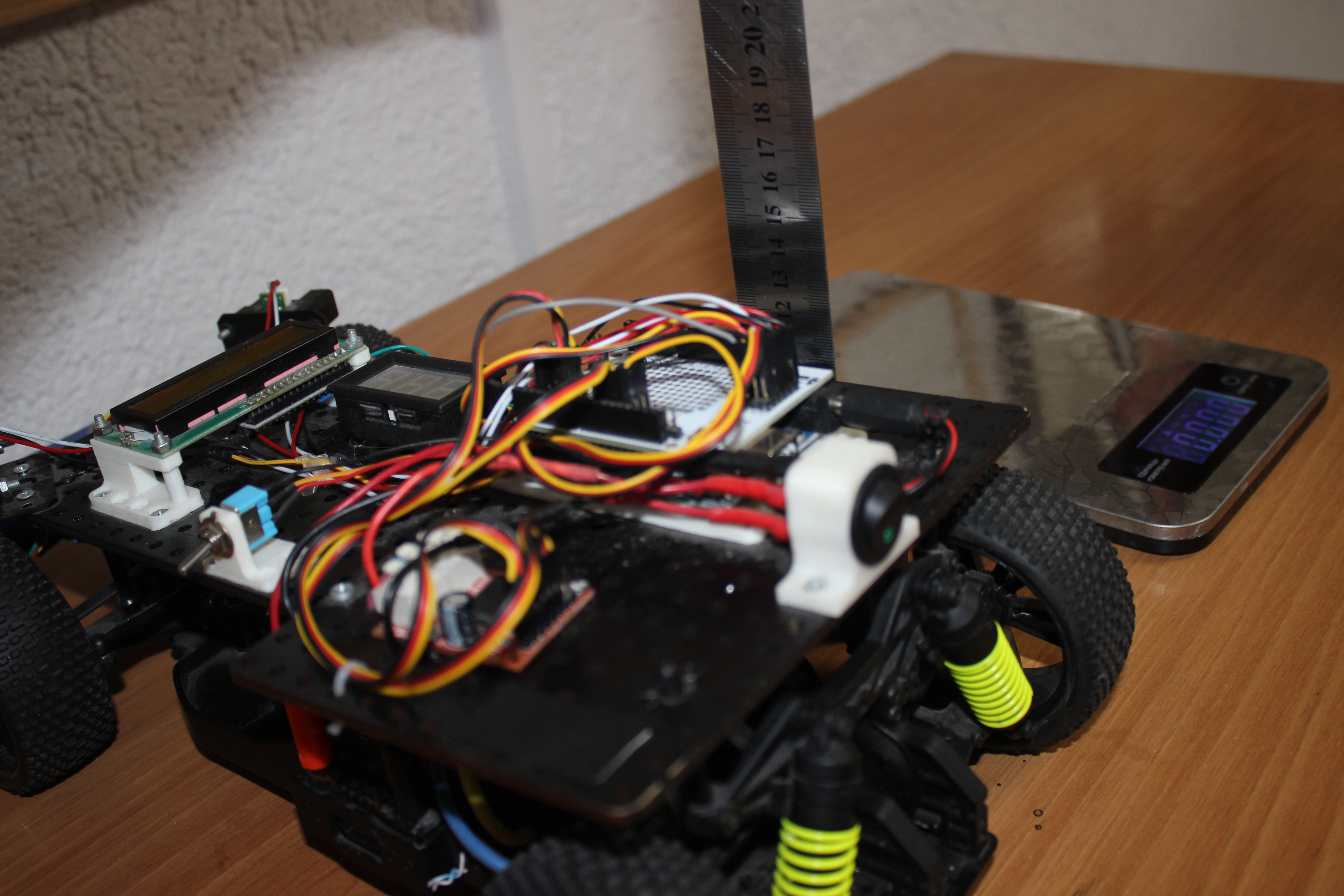
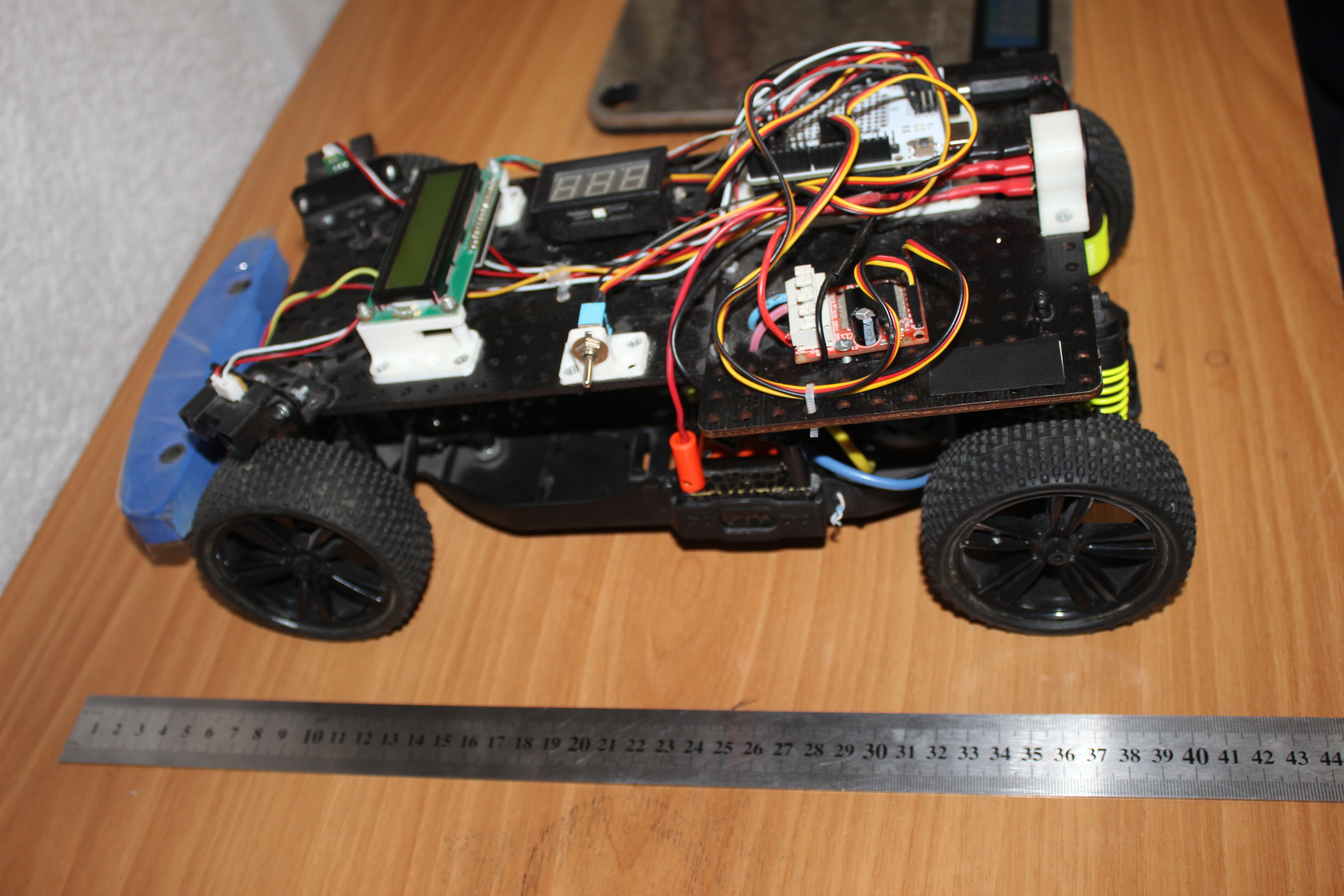
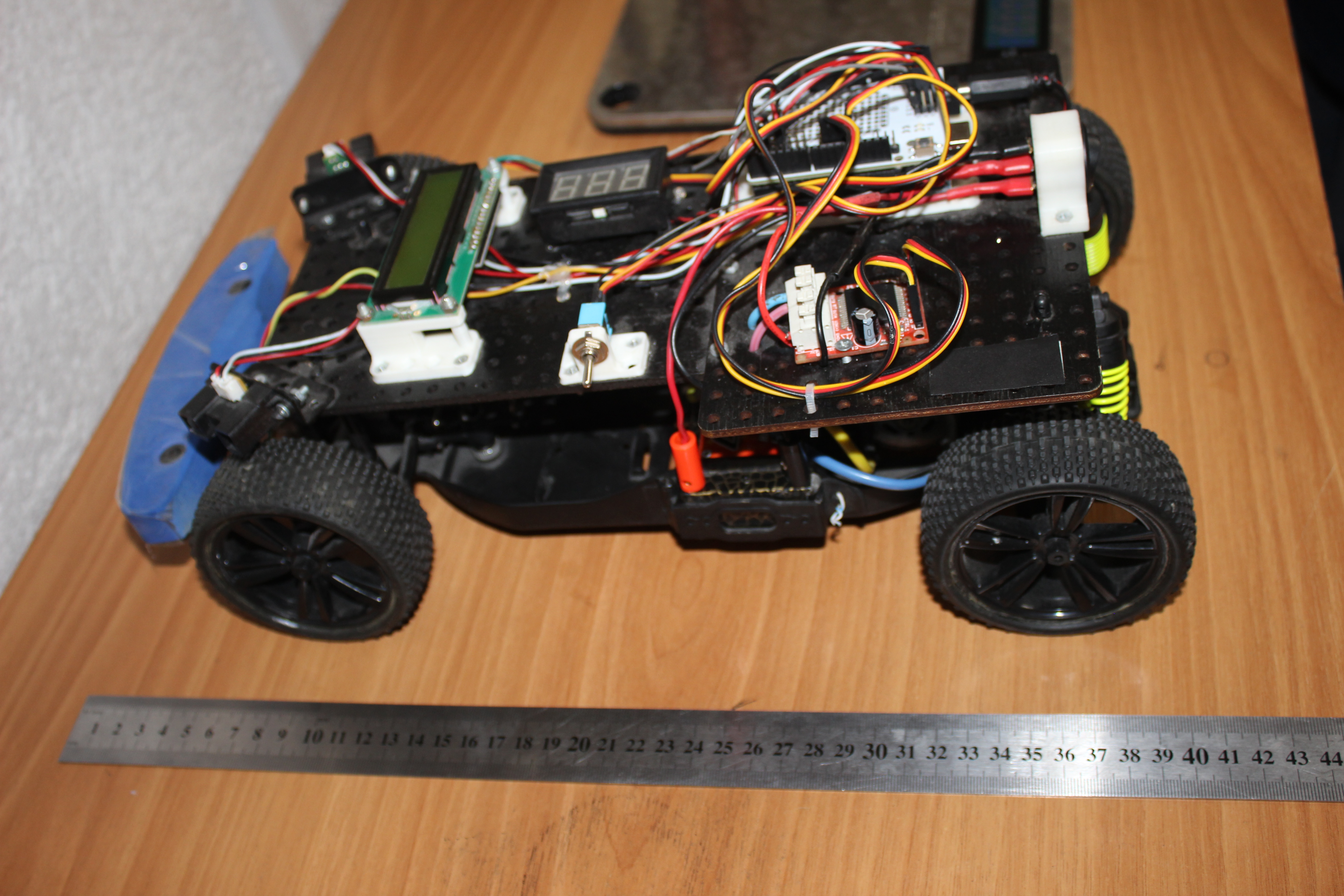
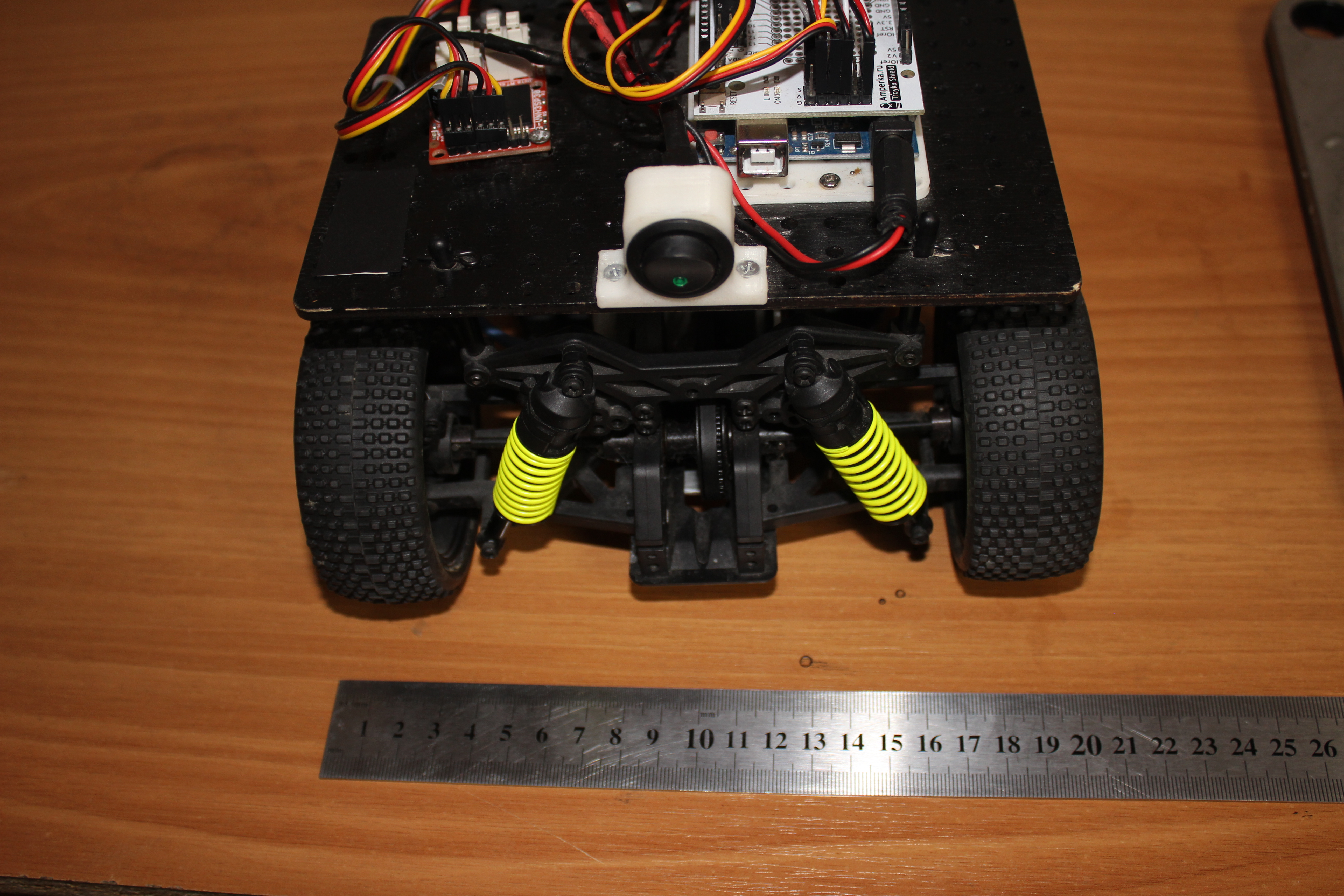
ROB-15527Робот для участия в номинации «Ралли по коридору». В роботе использована платформа от гоночной машины на радиоуправлении. Управление роботом сейчас осуществляется с помощью Arduino Uno. Расстояние до стен определяется с помощью инфракрасных датчиков Sharp 2Y0A02 (зона видимости 20-150 см). Рассмотреть чёрные полосы на полу перед препятствиями помогает аналоговый датчик линии Noname. Вес робота 1,5 кг. Размеры 38*20*15 см. В 2016 году робот занял 3 место. В 2017 году робот занимал лидерские позиции после квалификационных заездов, но в парном заезде ему не повезло. На трассе оказалось место, в котором застряли многие роботы, стартовавшие с левой стороны. В этот раз в программу внесены изменения, и мы надеемся снова стать призерами.
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024