Чистюля 76
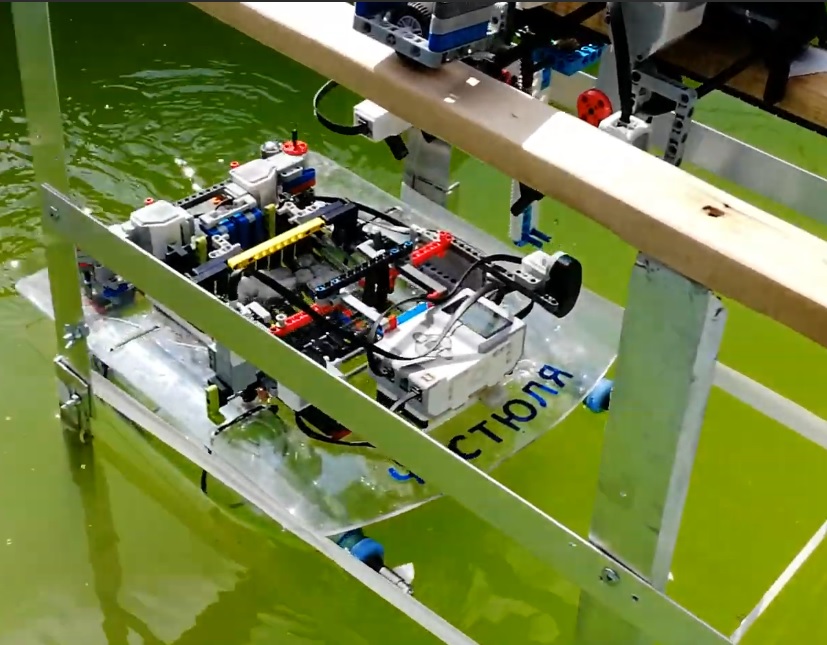
ROB-24053Проект "Чистюля" - наш вариант решения проблемы борьбы с мусором в водоёмах. Мы создали прототип роботизированной установки, который борется с мелким мусором (пластиком). Робот
собирает небольшие предметы, находящиеся на поверхности воды, перемещает их в
прикрепленную на сборщике корзину, а затем транспортирует на базу для выгрузки
в накопитель.
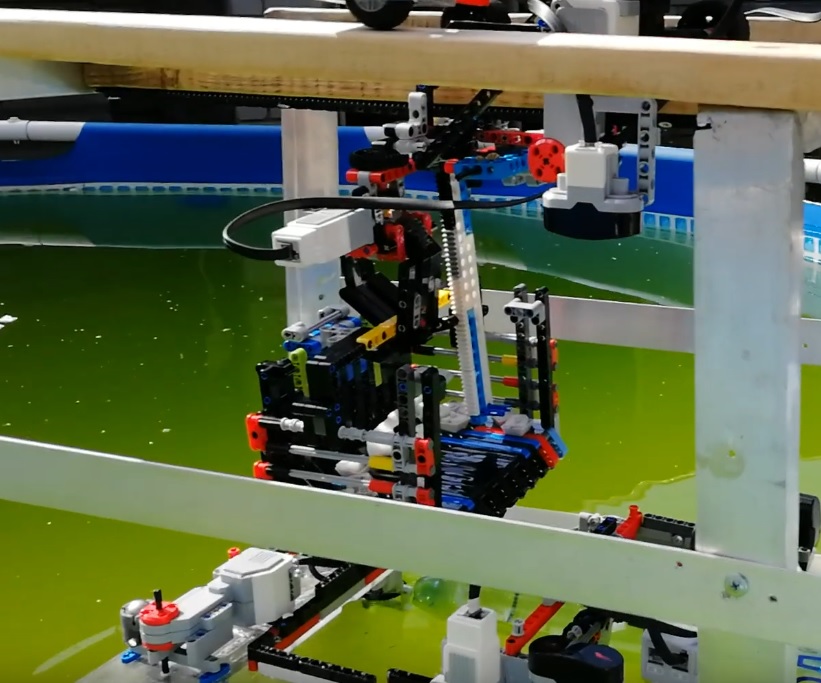
Проект сконструирован на платформе Lego Mindstorms и состоит и
двух частей: первая – робот-сборщик мусора с поверхности воды, а вторая – робот-манипулятор
для выгрузки собранного мусора на базе. Установка управляется двумя контроллерами (один на сборщике, один на базе),
оснащена тремя инфракрасными датчиками (для связи робота-сборщика и
робота-манипулятора на базе по системе «передатчик-маяк», для обнаружения припаркованного робота-сборщика и для осуществления ручного управления роботом-собощиком) и шестью моторами (два
больших (осуществление движения) и один средний (сбор мусора в корзину) на роботе-сборщике, два больших (подъем захвата и передвижение по гусенице) и один средний (захват корзины с мусором) на
манипуляторе). Так же, робот имеет гироскопический датчик для более точного движения.
Для того, чтобы робот-сборщих держался на воде - были использованы бутылки с воздухом под давлением, робот построен по принципу катамарана.
База держится на конструкции из алюминия и дерева. Подъем захвата собран при помощи зубчатых реек, что позволяет поднимать достаточно тяжёлый груз. Передвижение манипулятора от робота к контейнеру осуществляется при помощи гусеницы.
Роботизированная установка была проверена в реальных условиях пруда в ручном и автономном
режимах.
Файлы
Добавлен 27.12.2024
Добавлен 27.12.2024
Добавлен 27.12.2024
{kind=link}
{kind=link}