Titan
ROB-24512Макет протеза кисти руки
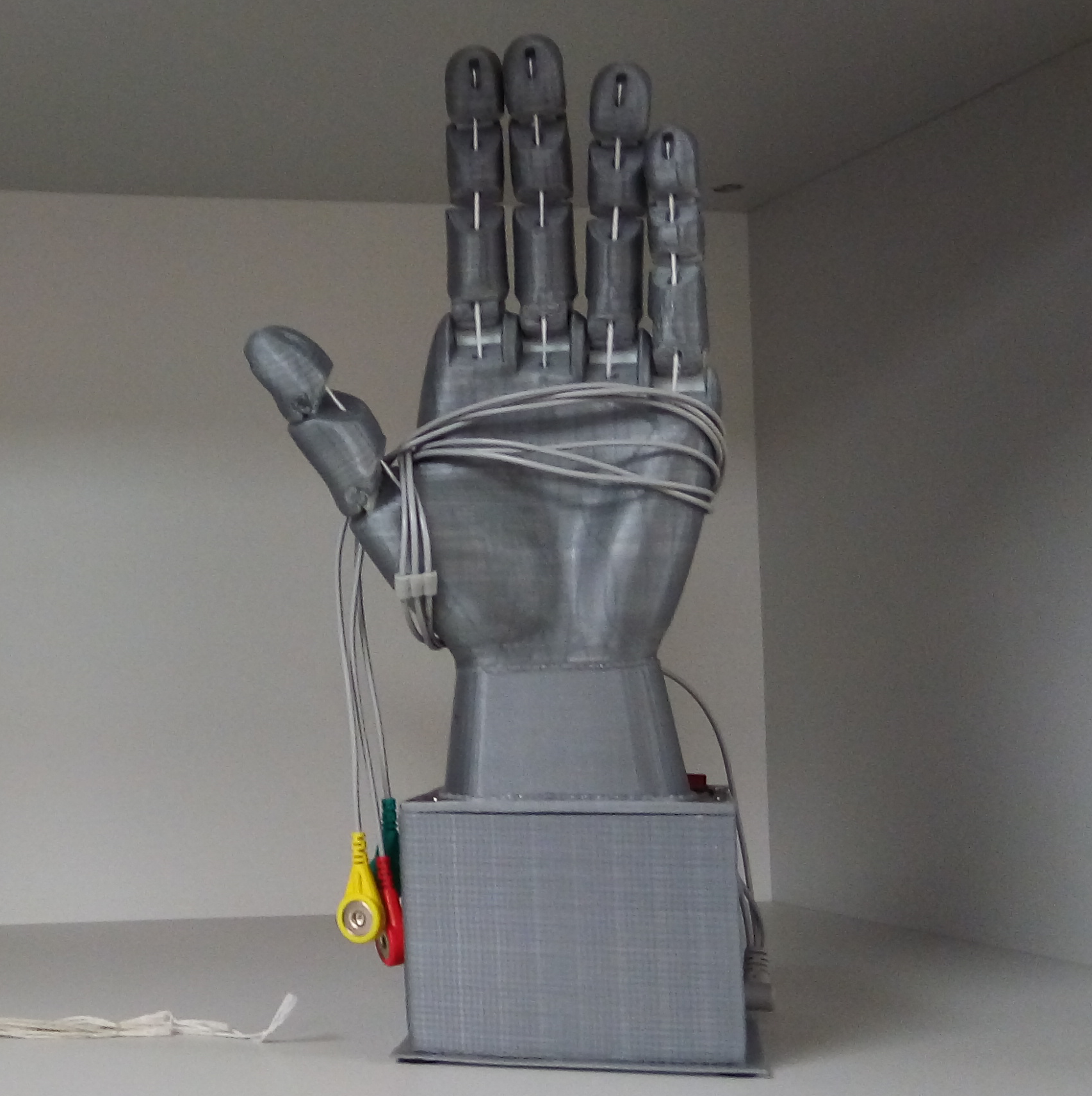
В данной практической работе была поставлена задача создать макет протеза кисти руки, обеспечивающей хватательную функцию.
Для решения поставленной задачи был выбран следующий алгоритм:
1. Считать сигнал о сокращении мышцы руки
2. Обработать и усилить сигнал для чтения платой Arduino
3. При обнаружении порогового значения о сокращении мышц включить сервопривод для сжатия подвижных суставов макета кисти руки, распечатанного на 3D-принтере
Результаты работы:
1. Собран и запущен электромиограф. Для чтения данных о сокращении мышцы руки выбраны поверхностные биполярные электроды
2. Сигнал с микроконтроллера усилен, плата Arduino способна определить сигнал на уровне шума
3. На видео продемонстрирована заключительная часть проекта, сокращение мышцы руки приводит к движению пальцев макета протеза кисти руки.
Файлы
Добавлен 27.12.2024
Дополнительные файлы
{kind=link}
Добавлен 27.12.2024