Атлант
ROB-24625Радар с селекцией движущихся целей
В данной практической работе была поставлена задача создать макет радара с селекцией движущихся целей, позволяющего обнаружить на неподвижном фоне подвижные объекты
Для решения поставленной задачи был выбран следующий алгоритм:
1. Считать данные с ультразвукового радара, находящегося на подвижной платформе, поворачивающейся при помощи сервопривода в диапазоне углов от 0 до 180 градусов и записать на плату Arduino
2. Обработать массив полученных данных, отсеять шумы и вычислить координаты обнаруженных объектов
3. На основе метода селекции движущихся целей отобразить на экране планшета подвижные цели, скорость которых превышает выбранное пороговое значение
Результаты работы:
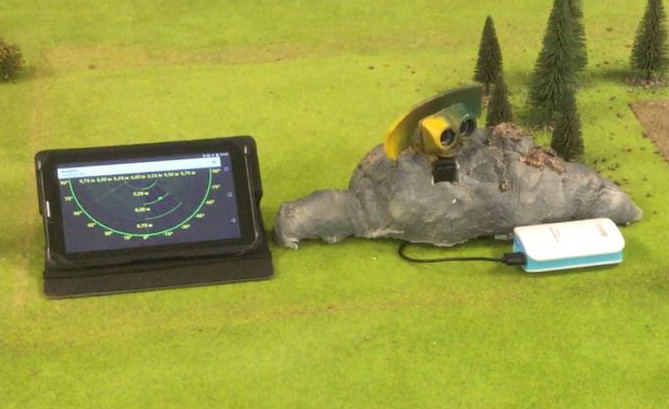
1. Собран действующий макет радара с селекцией движущихся целей
2. Для определения положения объектов был рассчитан центр масс каждого обнаруженного объекта, а затем по методу кратчайшего расстояния была вычислена точка перемещения каждого объекта и выявлены подвижные объекты
3. На видео продемонстрирована заключительная часть проекта, подвижный объект (в данном случае игрушечный танк на радиоуправлении) успешно обнаруживается радаром с селекцией движущихся целей, направление на объект, дистанция до него и скорость его перемещения отмечены цветным красным маркером на экране планшета.
Файлы
Добавлен 27.12.2024
Дополнительные файлы
{kind=link}
Добавлен 27.12.2024