What_Is_Love
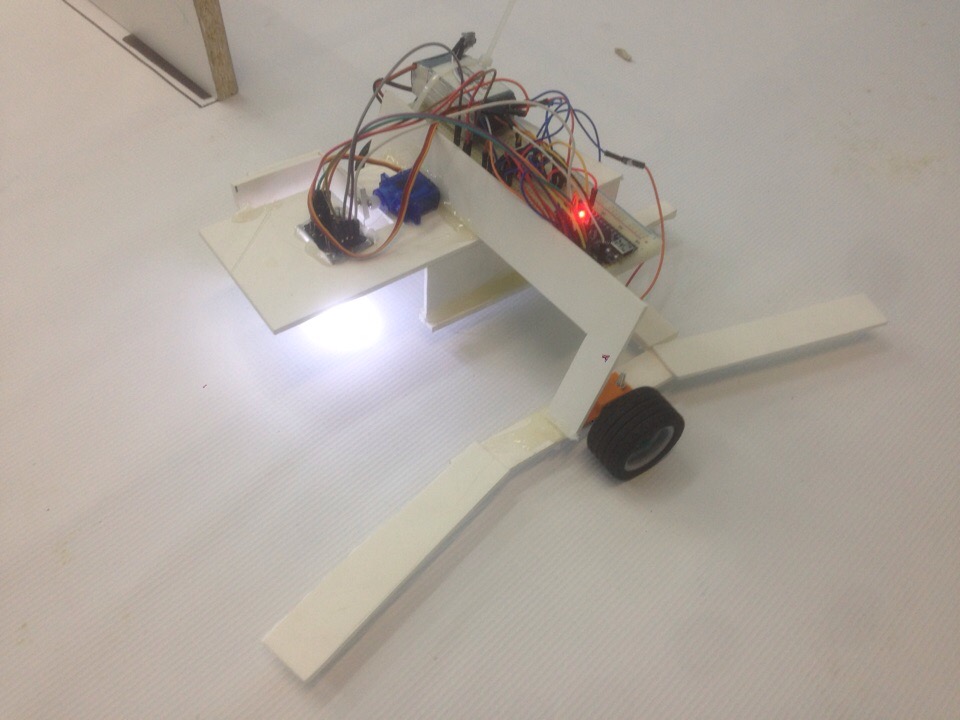
ROB-24630Для выполнения задания “Сортировщик” робот был сконструирован такой формы, чтобы кубики могли свободно проходить сквозь него. В качестве микроконтроллера была использована Arduino Nano. Чтобы кубики попадали в корзину, мы установили сервомотор, который как клюшка сбивает их. Для определения цвета кубика мы использовали датчик цвета TCS230. Установлены двигатели постоянного тока, которые разгоняются до 200 оборотов в минуту. Моторы управляются микросхемой l293d. Для питания электроники использован литий-полимерный аккумулятор, выдающий напряжение в 12 вольт и емкостью 800mAh.
Файлы
Добавлен 27.12.2024
Дополнительные файлы
{kind=link}
Добавлен 27.12.2024