FromUranus
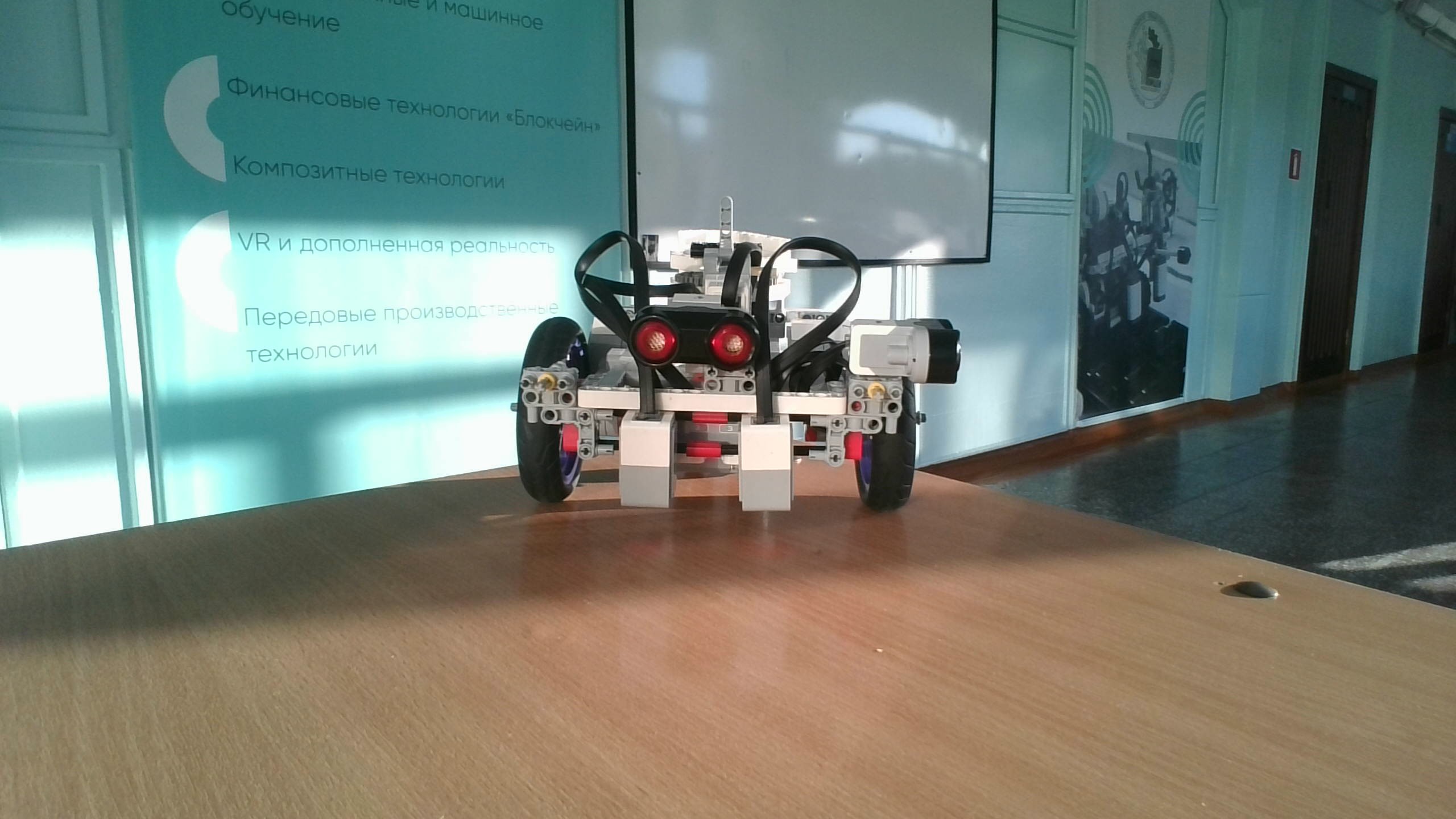
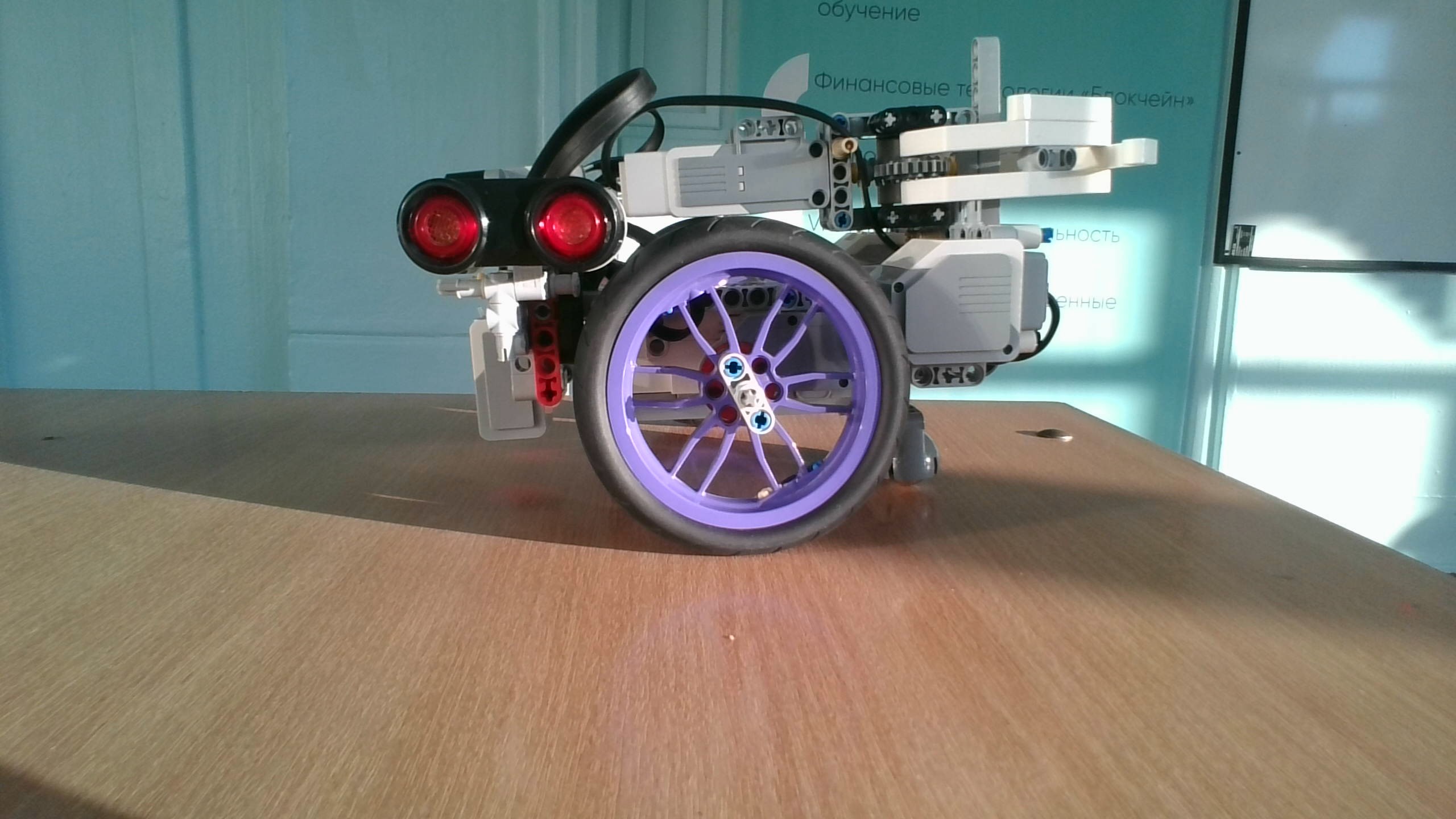
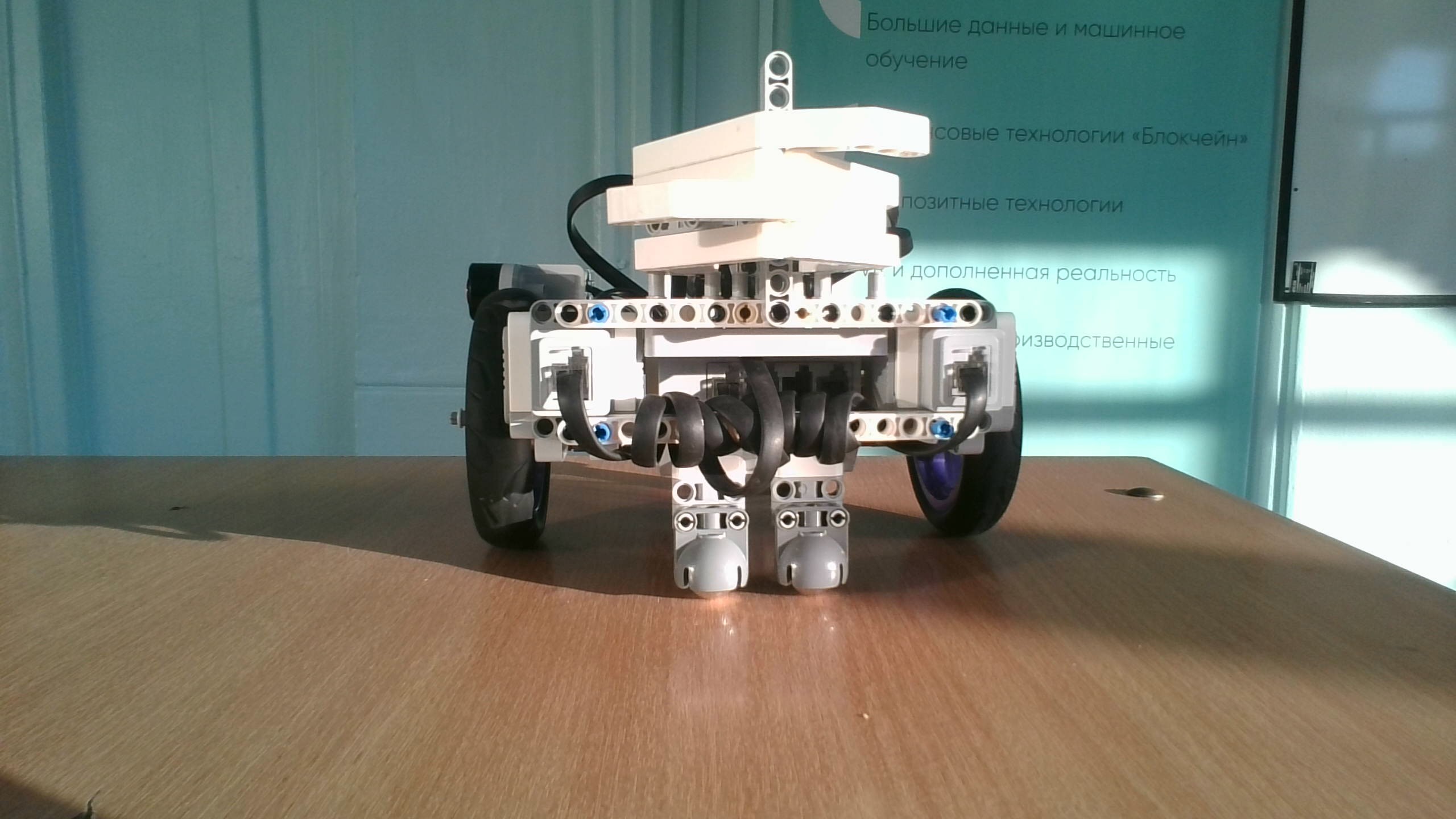
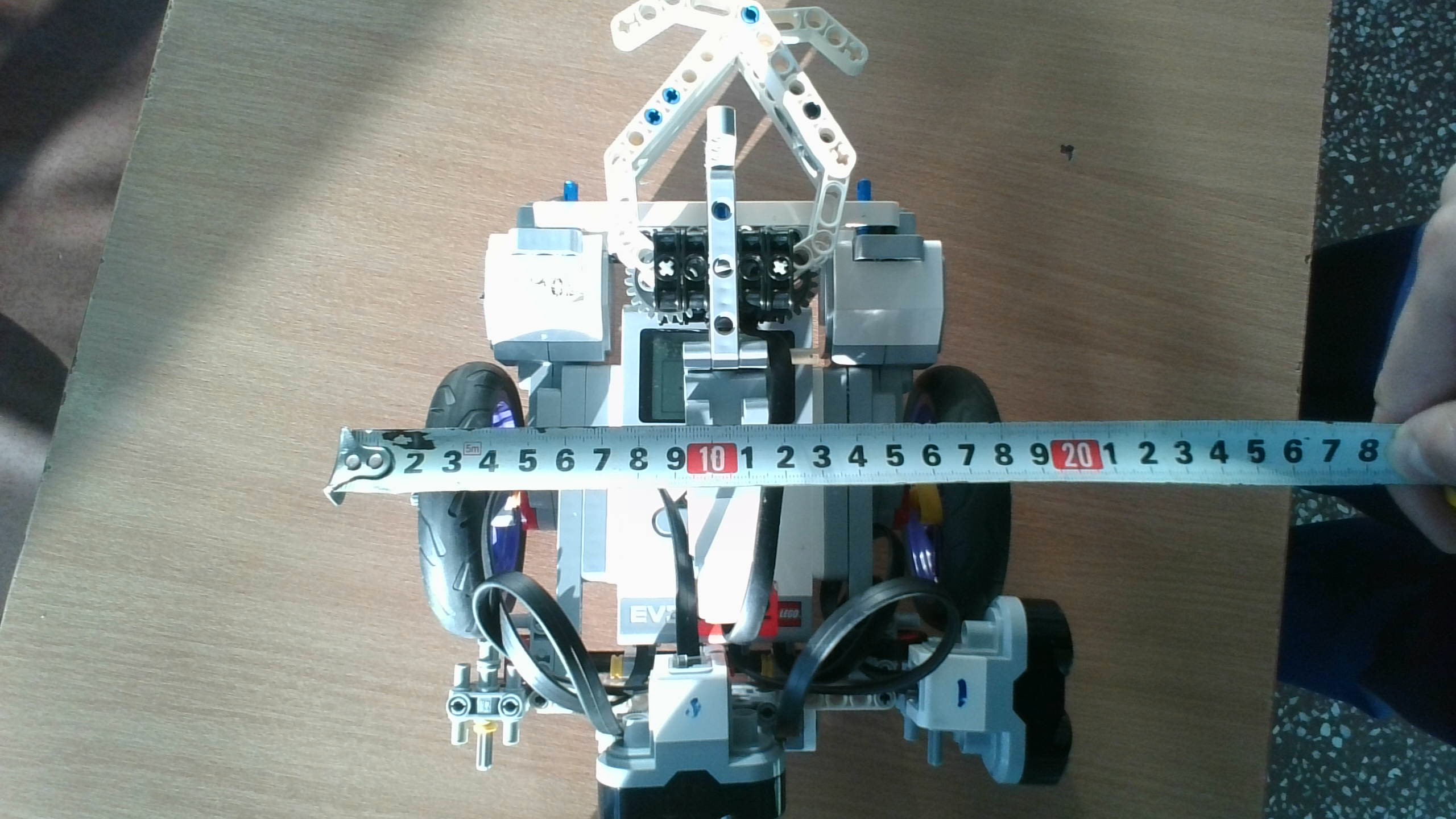
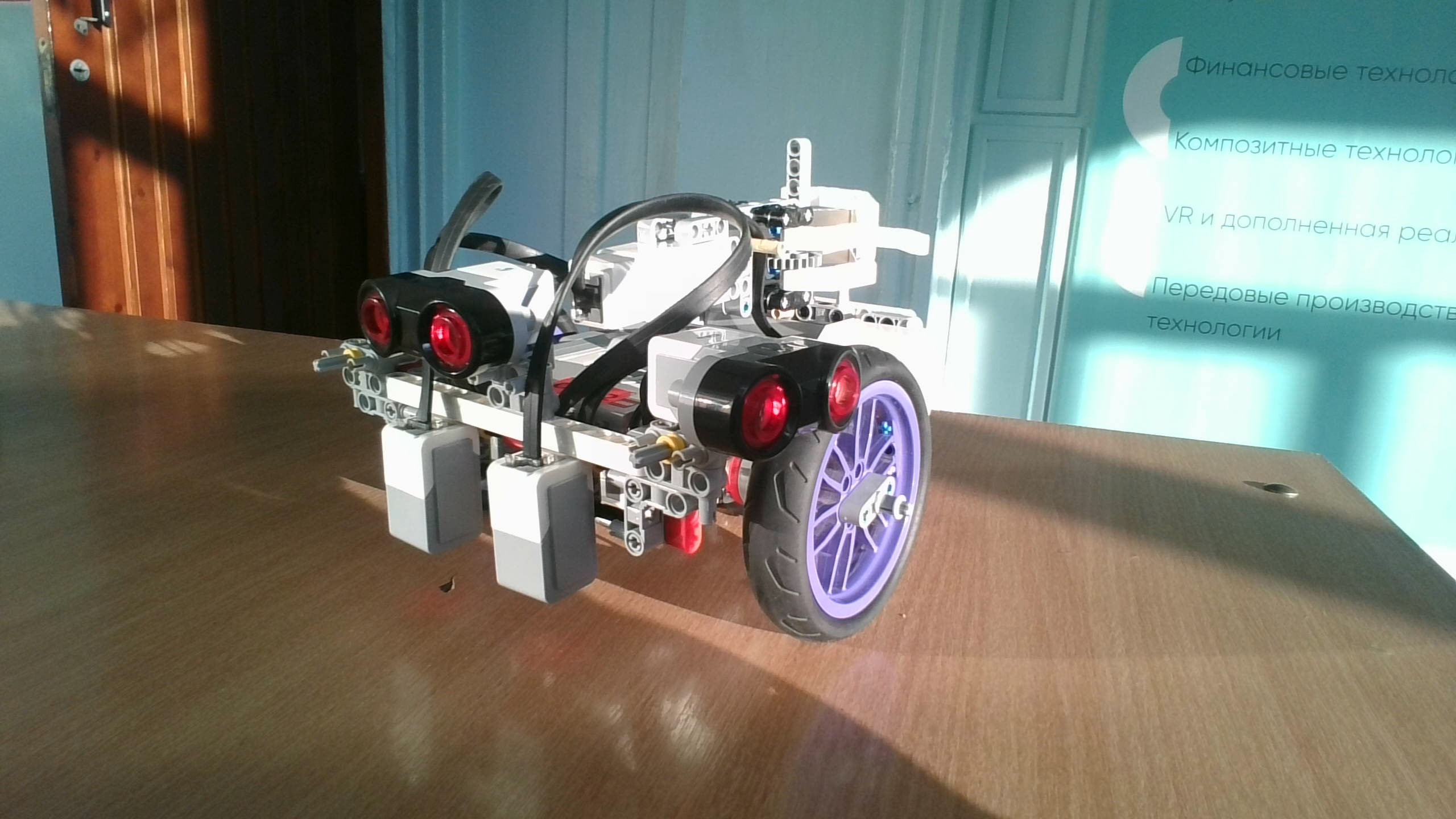
ROB-30112Робот был сделан в классической манере нашей команды, основа нашего робота использовалась уже не в первых соревнованиях, и эта основа является универсальной. Используется два больших мотора для движения, один средний мотор для осуществления захвата, два датчика света для следования по линии и два датчика ультразвука для прохождения лабиринта и для реализации кегельбана. Размер не более 240 мм в длину на 210 мм в ширину. Для движения используется два колеса диаметром 90 мм и две шаровых опоры сзади. Т.к. центр массы приходится на заднюю часть, робот является довольно устойчивым. Тип захватного механизма - клешневой. Используется прямая передача крутящего момента с моторов на колёса.
Файлы
Добавлен 22.11.2024
Дополнительные файлы
{kind=link}
Добавлен 22.11.2024
{kind=link}
Добавлен 22.11.2024
{kind=link}
Добавлен 22.11.2024
{kind=link}
Добавлен 22.11.2024
{kind=link}
Добавлен 22.11.2024
{kind=link}
Добавлен 22.11.2024
{kind=link}
Добавлен 22.11.2024