Мило
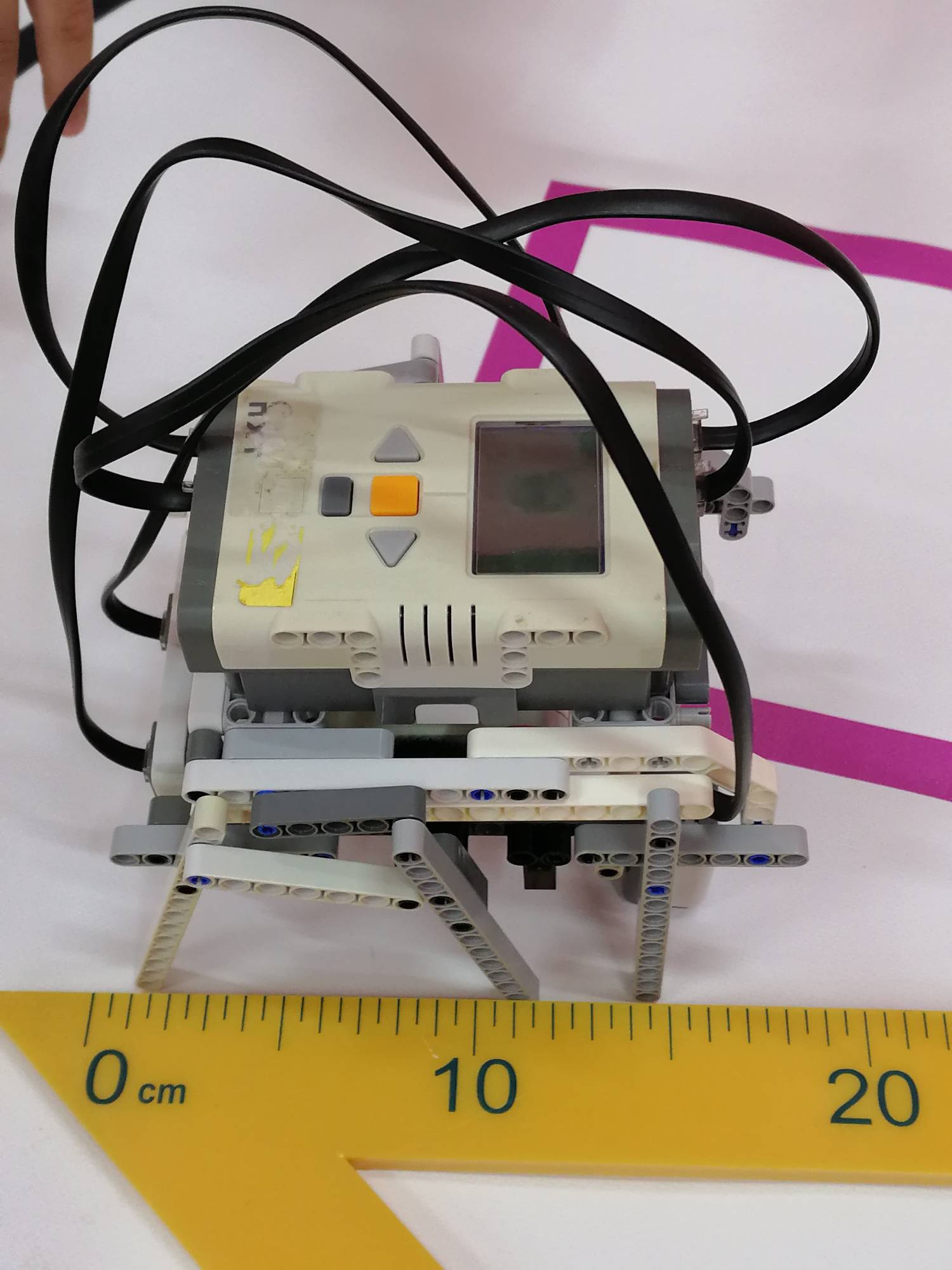
ROB-42094Для создания робота нам понадобилось изучение комплекта LEGO Education. Если механизм крепления ног к корпусу допускает движения не только прямо вперед (или прямо назад), то шестиногий робот сможет перемещаться в любую сторону. Робот строился по следующим принципам ):
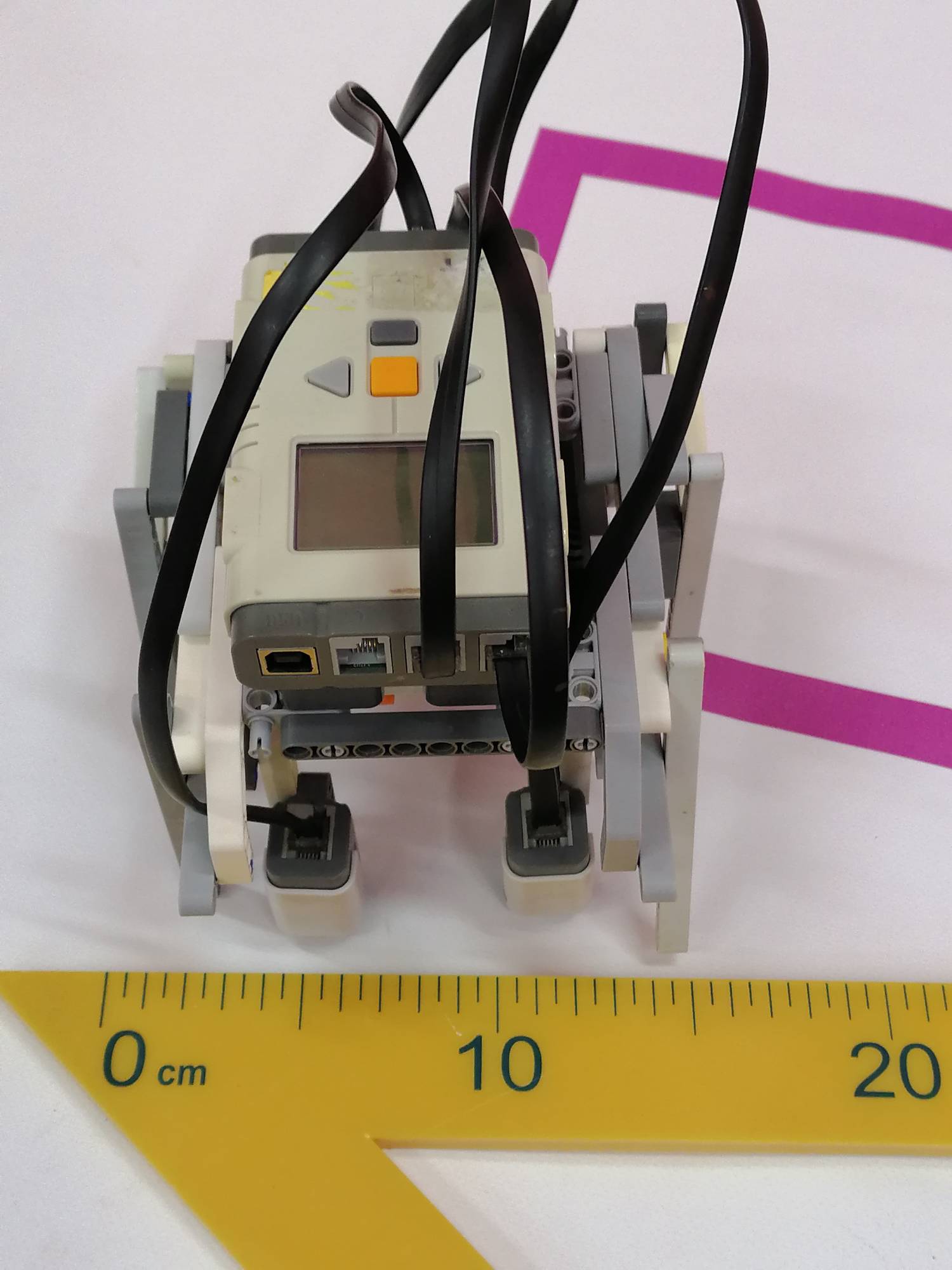
- робот должен стоять на поверхности (полигоне), упираясь только на «ноги»;
- «ноги» робота приводятся в движение двумя моторами;
- движение «ног» должно быть возвратно-поступательным;
- центр тяжести робота должен быть смещен вперед по ходу движения.
После сборки модели ставится задача разработки тестирующей программы :
- использовать блок «Цикл», сконфигуровать его как бесконечный цикл;
- использовать блок «Движение» внутри бесконечного цикла.
Поскольку работа ног при этом будет осуществляться в той же последовательности, что и при ходьбе только прямо вперед, статическая устойчивость сохранится. Мы создали робота, запрограммировали. Ура!
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024