Захватчик-3000
ROB-51403Назначение робота: езда по черной линии и передача груза посредством захвата
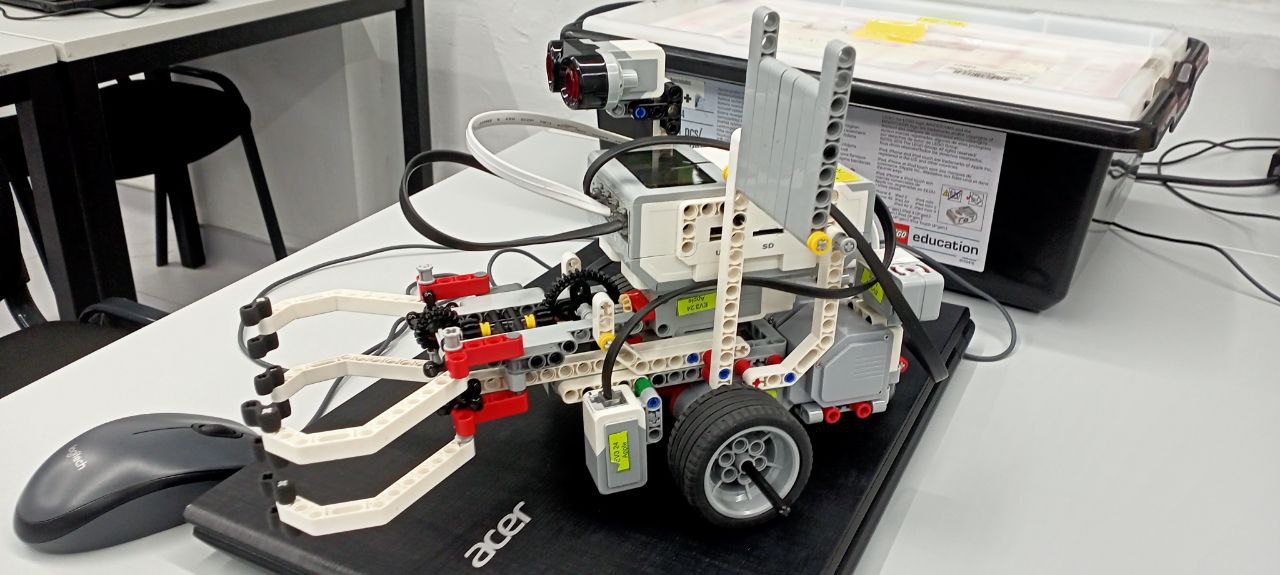
Используемые детали: Два больших мотора, один средний мотор, ультразвуковой датчик, два датчика цвета, колеса, балки, штифты
Описание конструкции и конструкторских решений: В основе лежит мобильная платформа с прикрепленной к ней захватом. Из-за высокого расположения ультразвукового датчика, сделана стенка из балок, для отслеживания другим роботом.
Используемые механизмы: Мобильная платформа, захват
Описание программы: Когда робот готов к работе, он подбирает груз с помощью захвата, разворачивается на 180 градусов, затем едет по черной линии посредством П-регулятора. Когда робот видит третью черную линию, он отпускает груз и отъезжает. Второй робот, когда увидел первого робота, ждет 5 секунд, затем подъезжает к грузу и повторяет программу.
Дополнительные файлы
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
Добавлен 10.12.2024