Модель конвейерной линии "Сортировщик мусора"
ROB-55810Модель конвейерной линии
«Сортировщик мусора»
Модель полностью спроектирована нашей командой. Мы много экспериментировали в процессе сборки, для нахождения наилучшего решения.
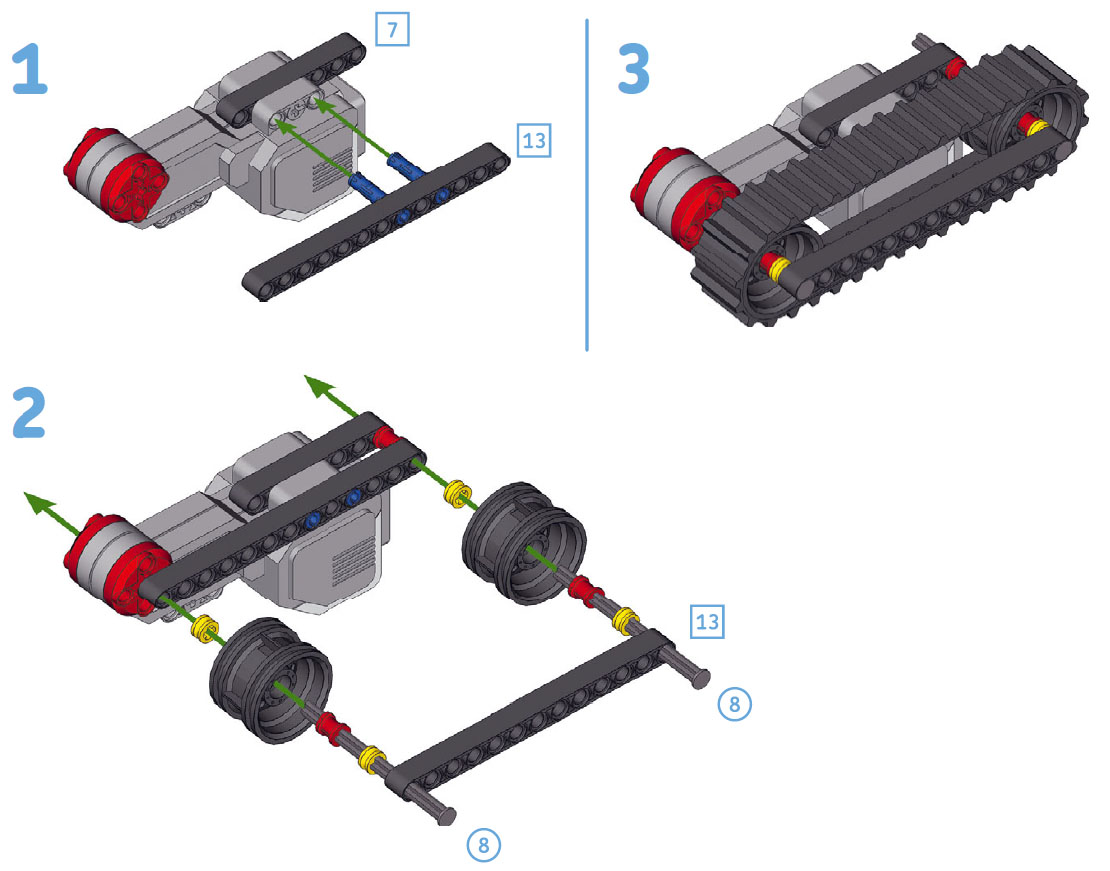
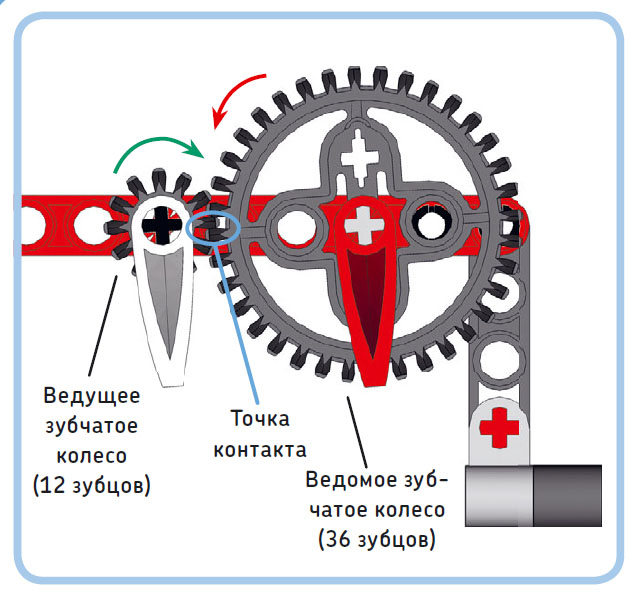
Мы изучили сборку из конструктора Lego отдельных движущихся узлов. В работе мы использовали различные зубчатые и ременные передачи.
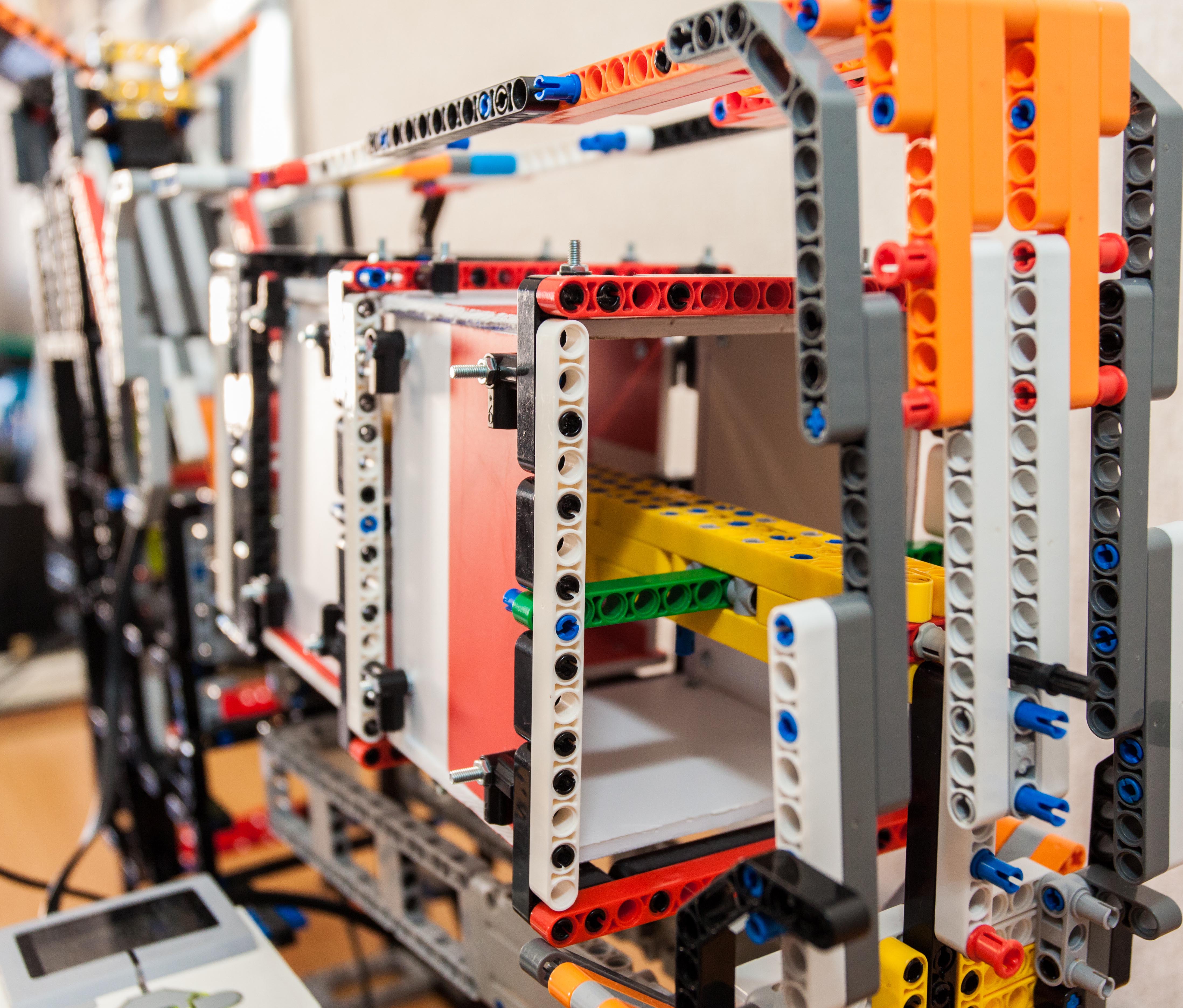
В конструкции использовано большое количество деталей и потребовалось надежное соединения балок.
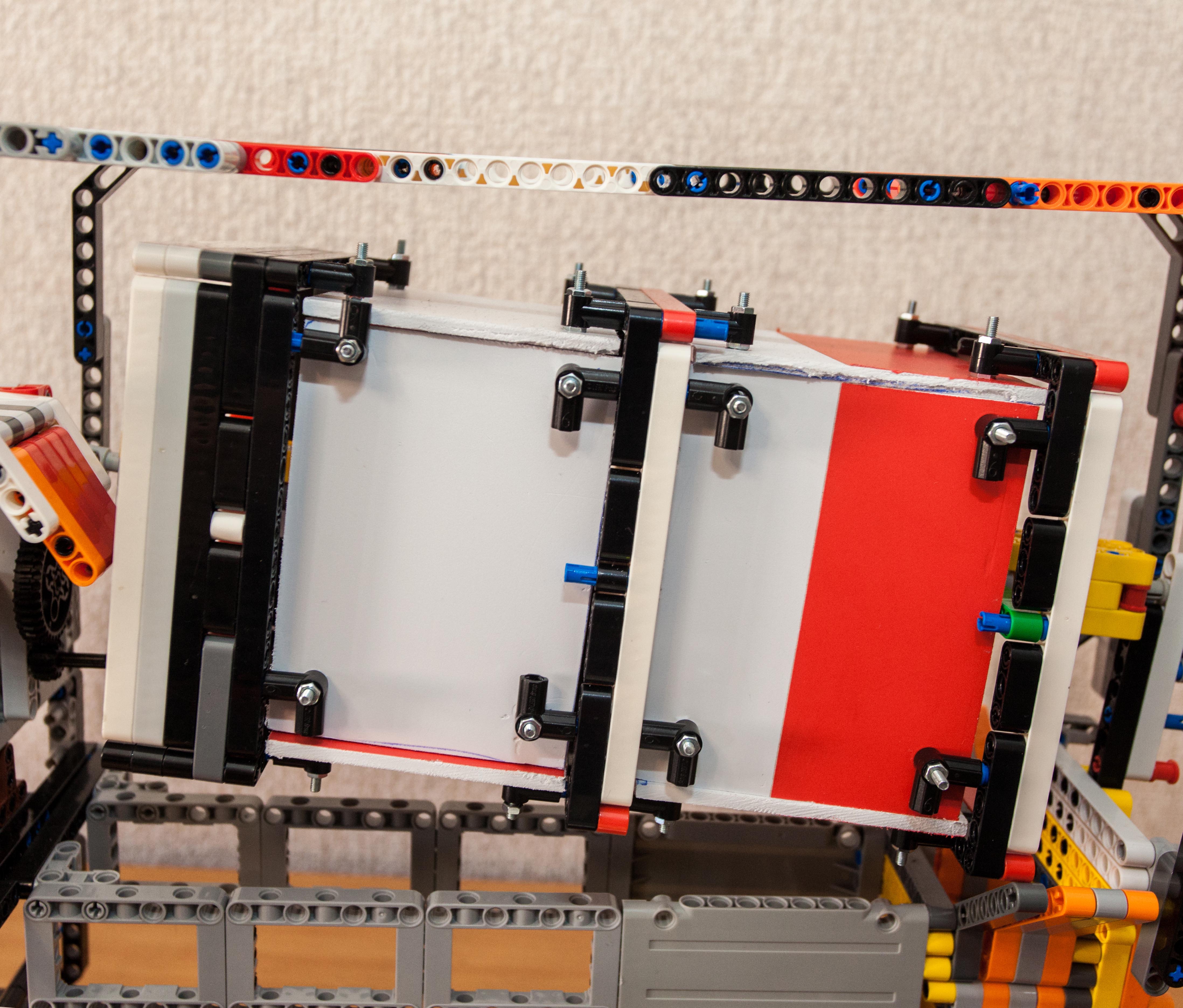
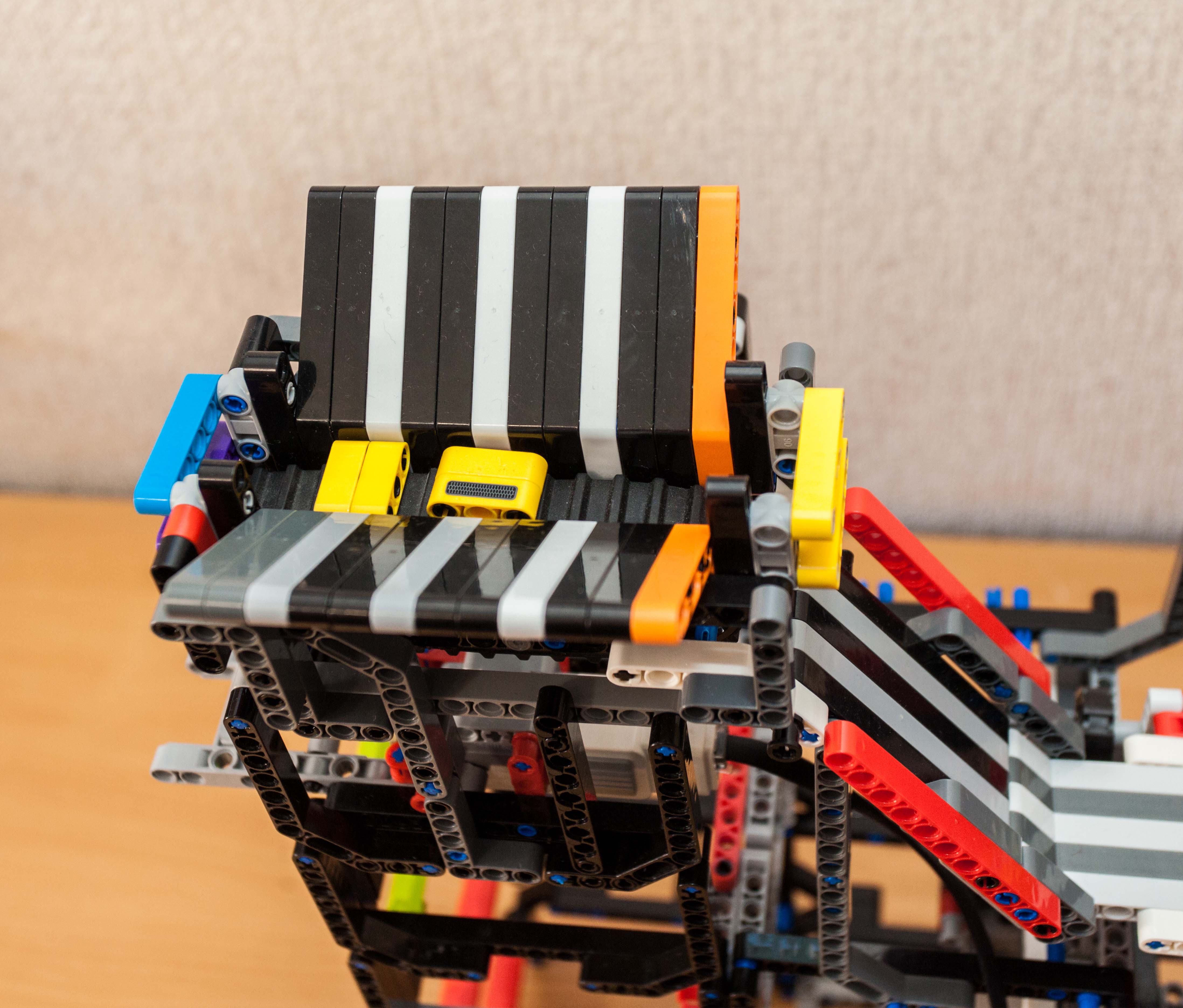
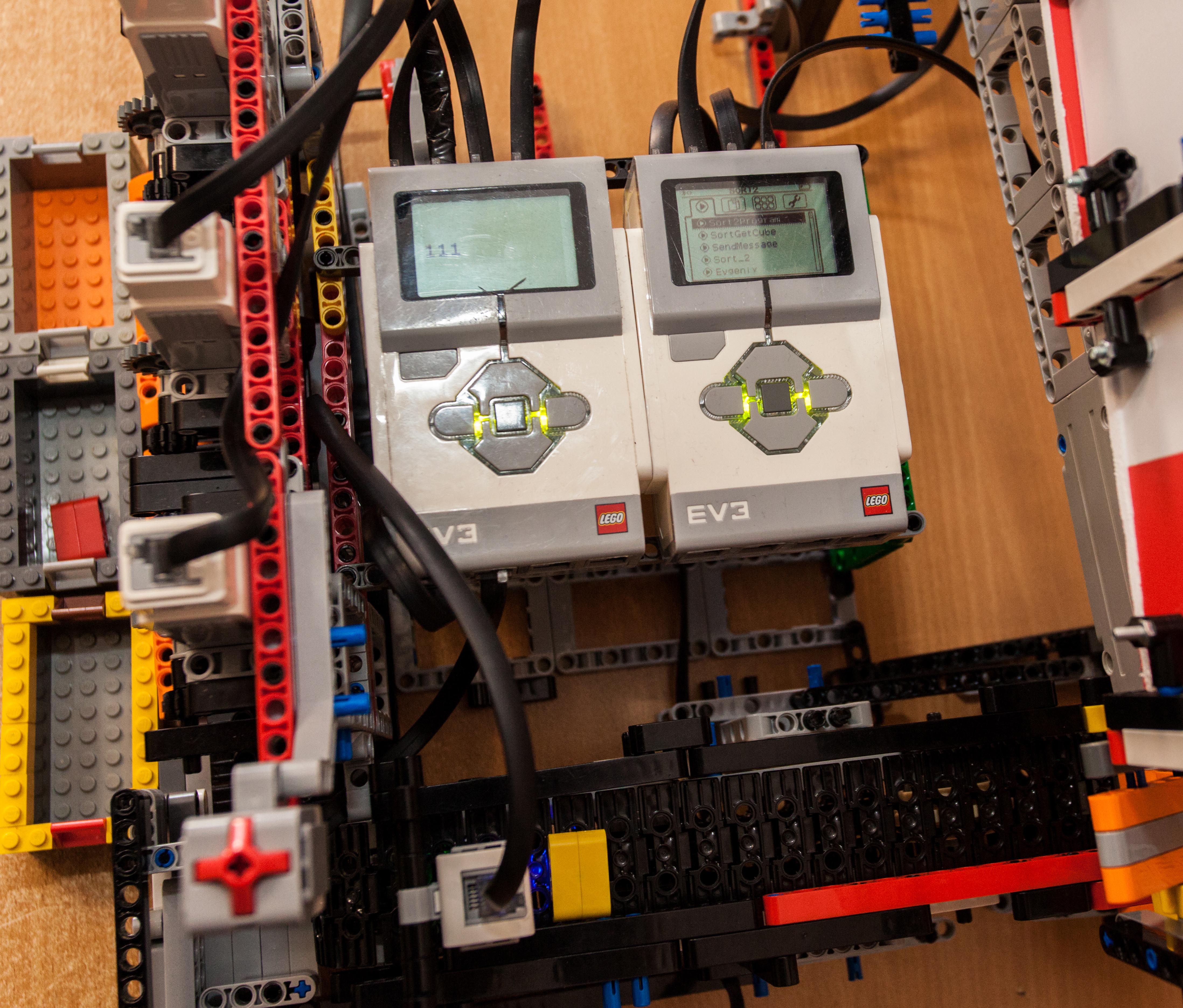
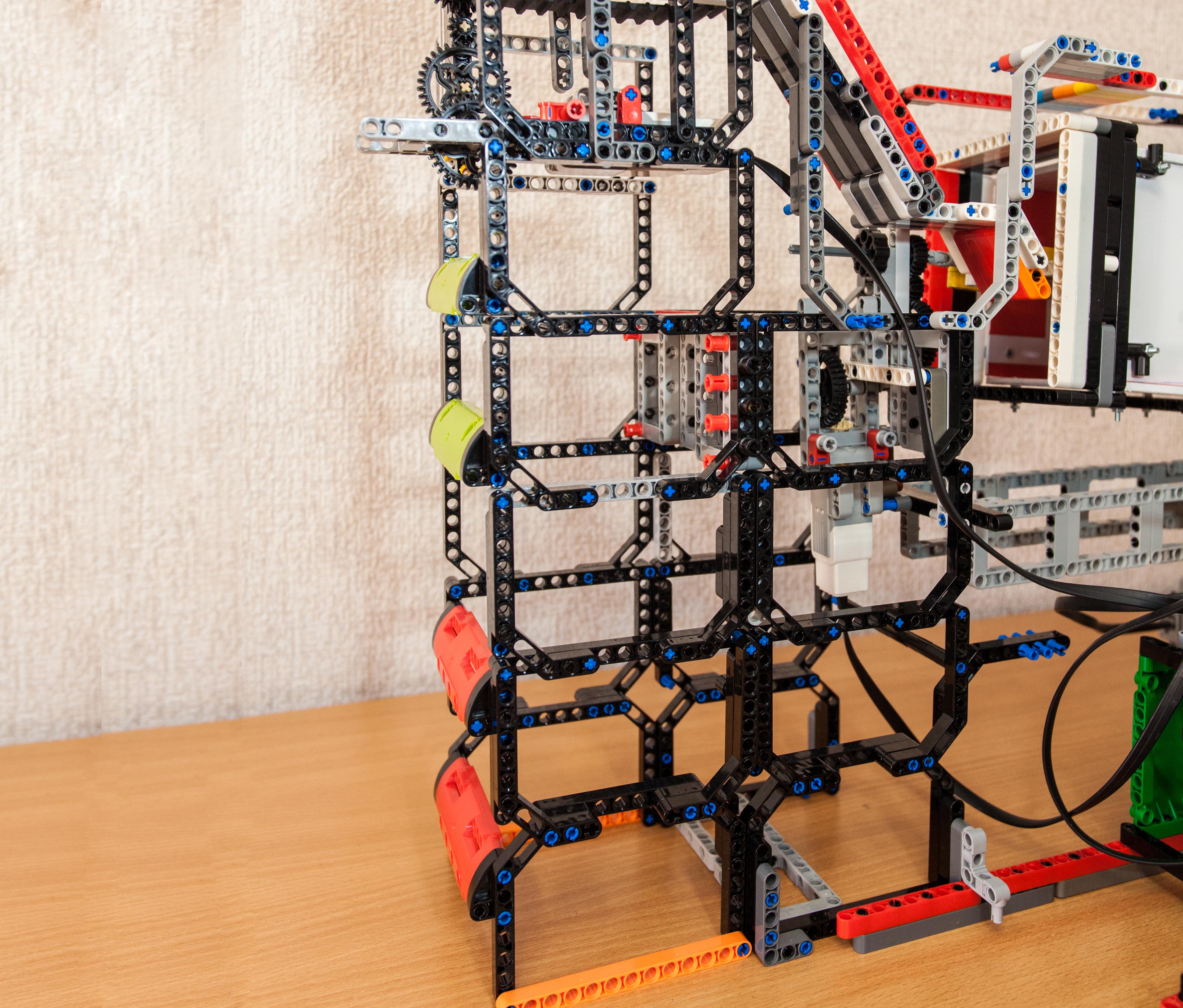
Конструкция состоит из двух блоков управления Lego EVE3, восьми двигателей, размещенных в нескольких узлах конструкции. Первый узел – это контейнер, в который загружаются все детали. Он имеет форму воронки и находится на верхнем уровне всей конструкции.
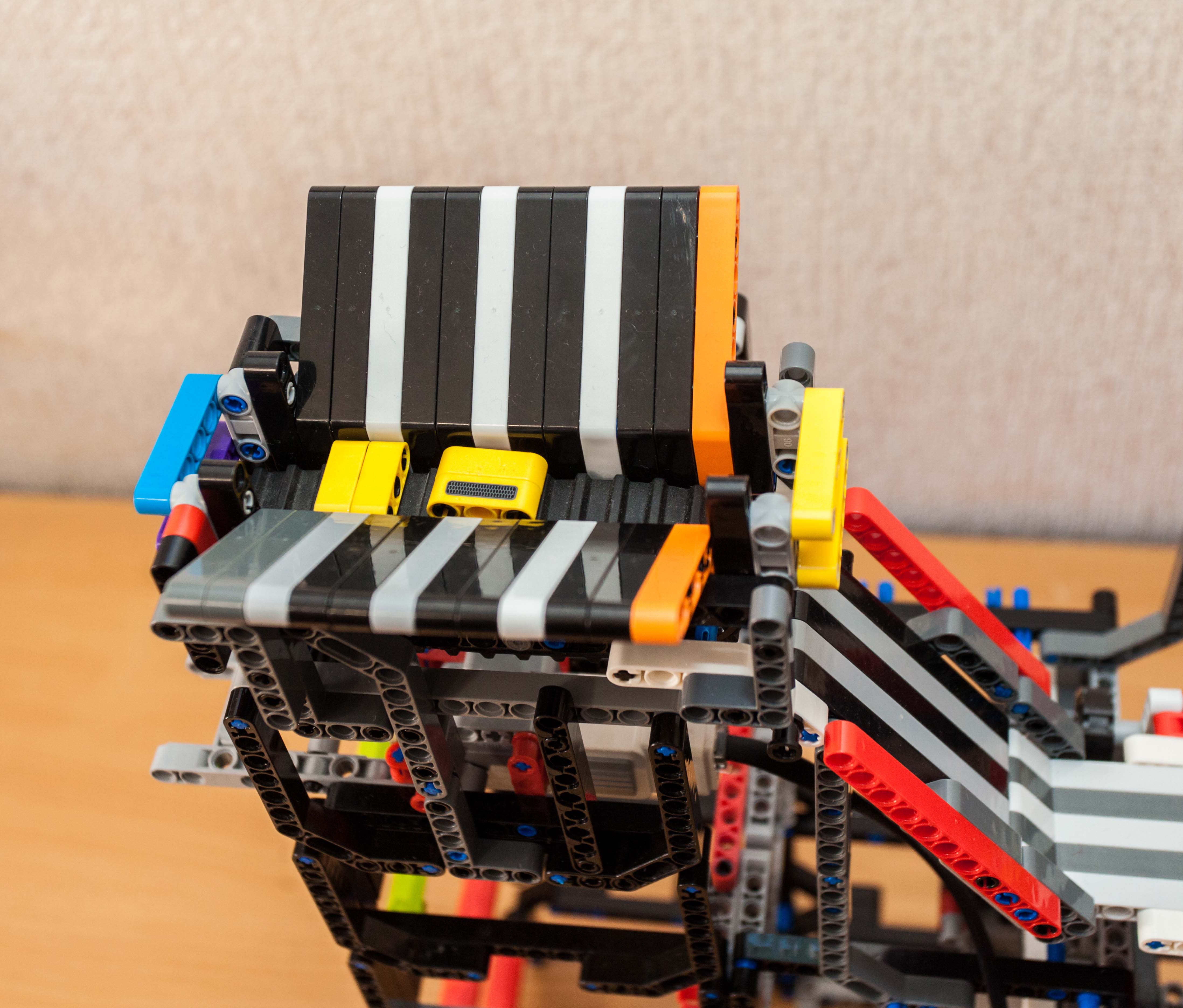
В нижней части контейнера имеется резиновая движущаяся лента, управляемая «Средним мотором». Лента постепенно двигает детали по направлению к сортировочному барабану, который является следующим узлом конструкции.
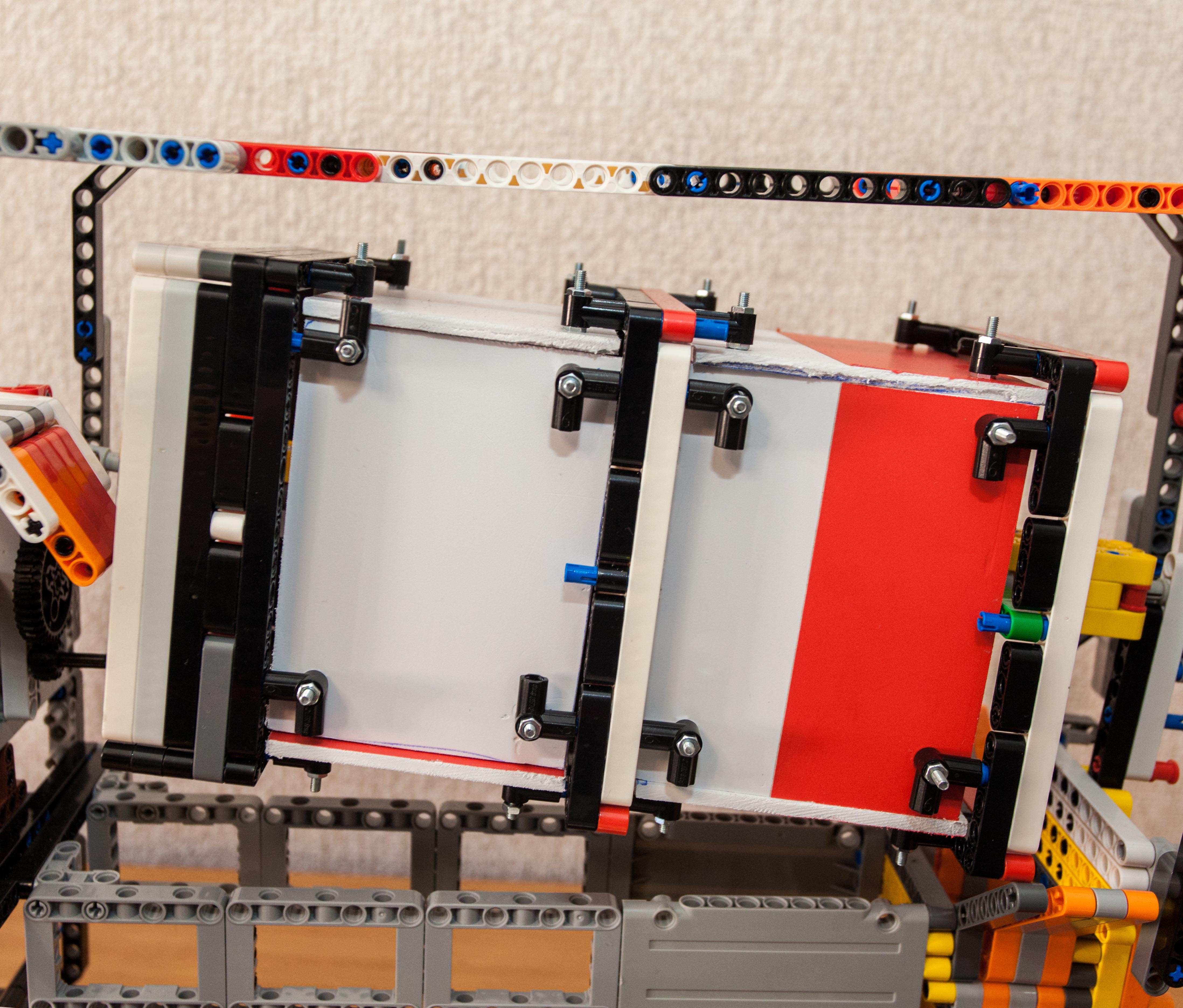
Барабан размешивает детали, для того, чтобы они вываливались на ленту поштучно. Для экономии деталей стенки барабана сделаны их пластика. Прикрепить стенки пришлось винтами, так как штифты от Lego мешали выпадению тестовых деталей в воронку. Барабан приводится в движение «Средним мотором».
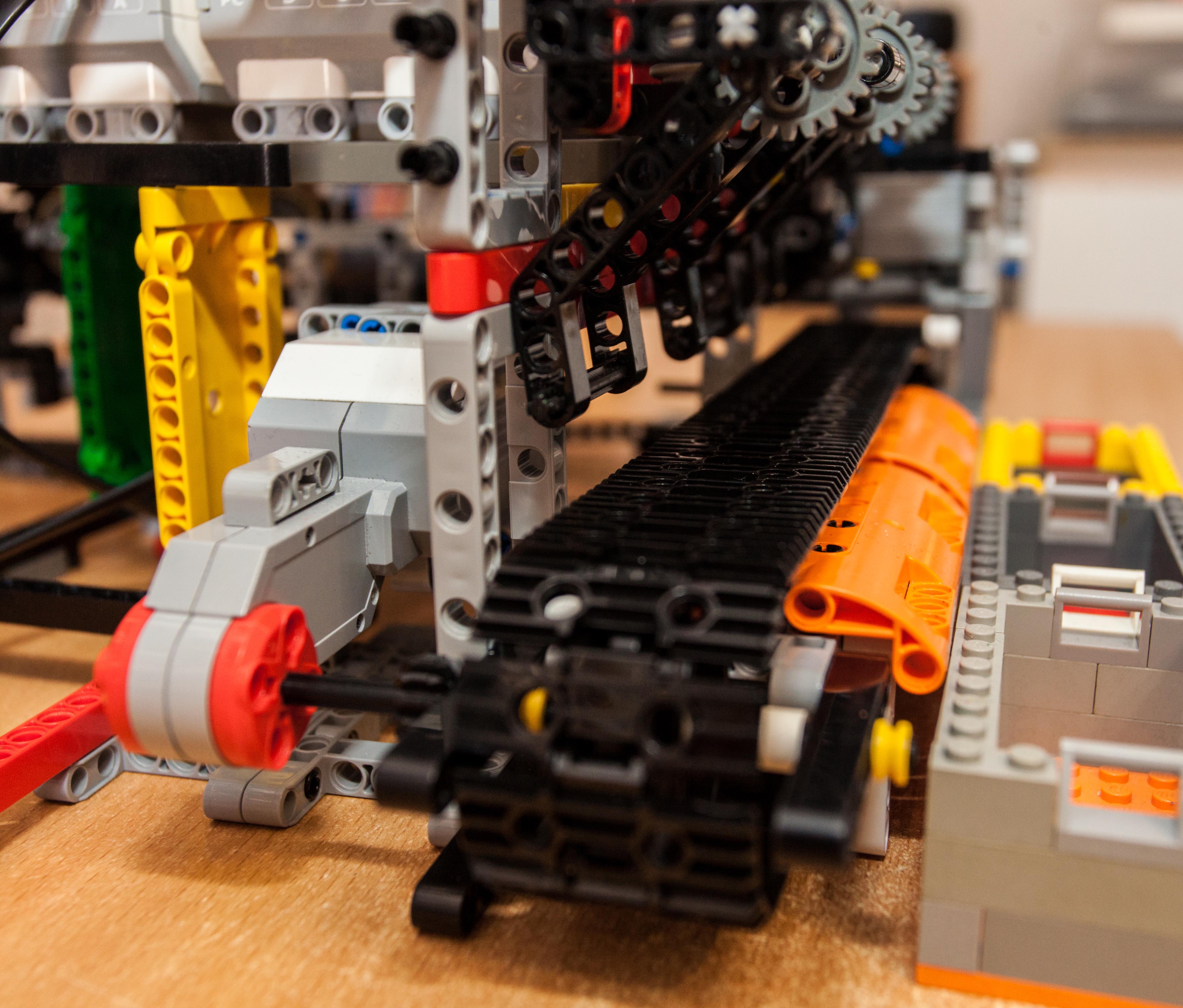
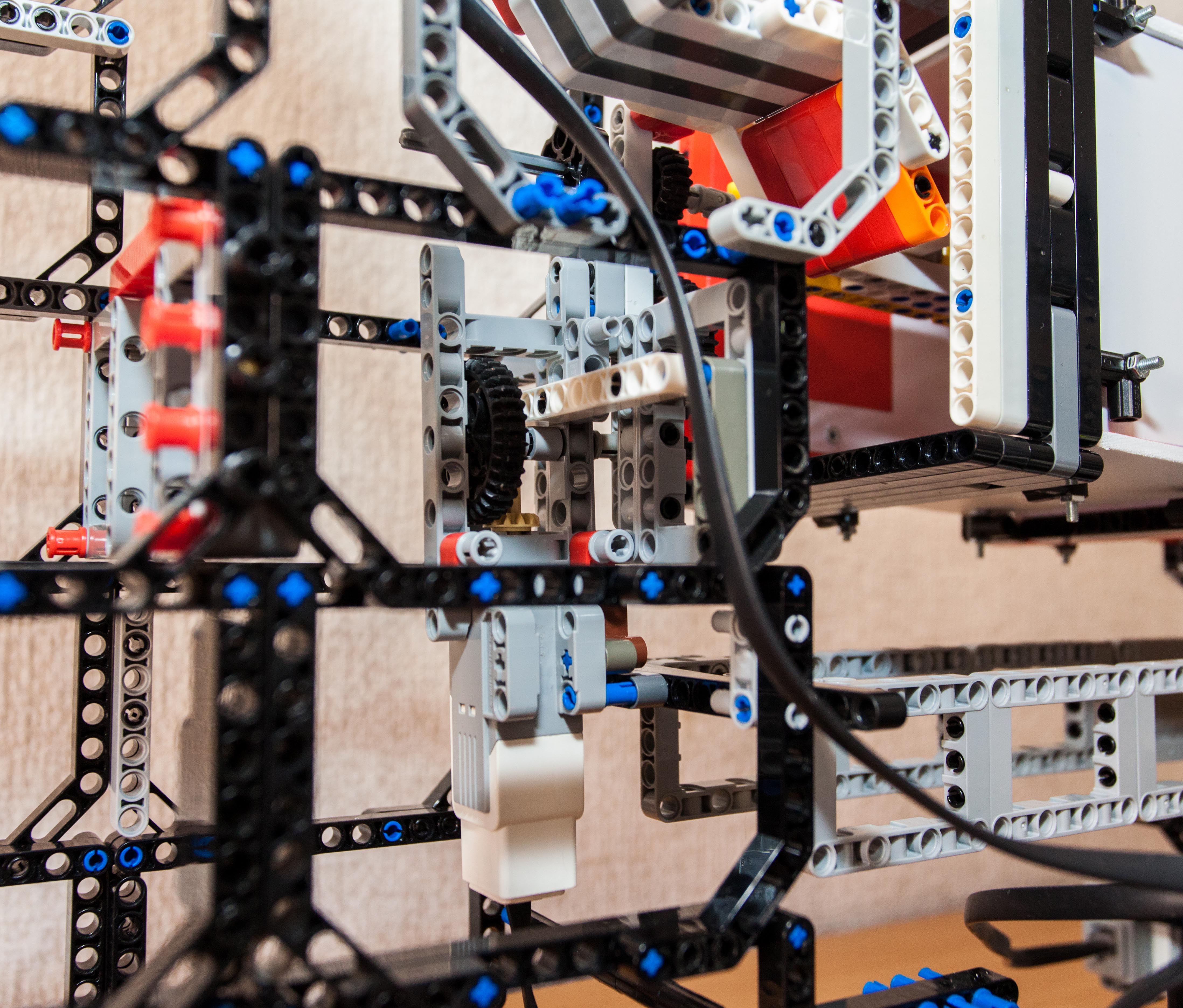
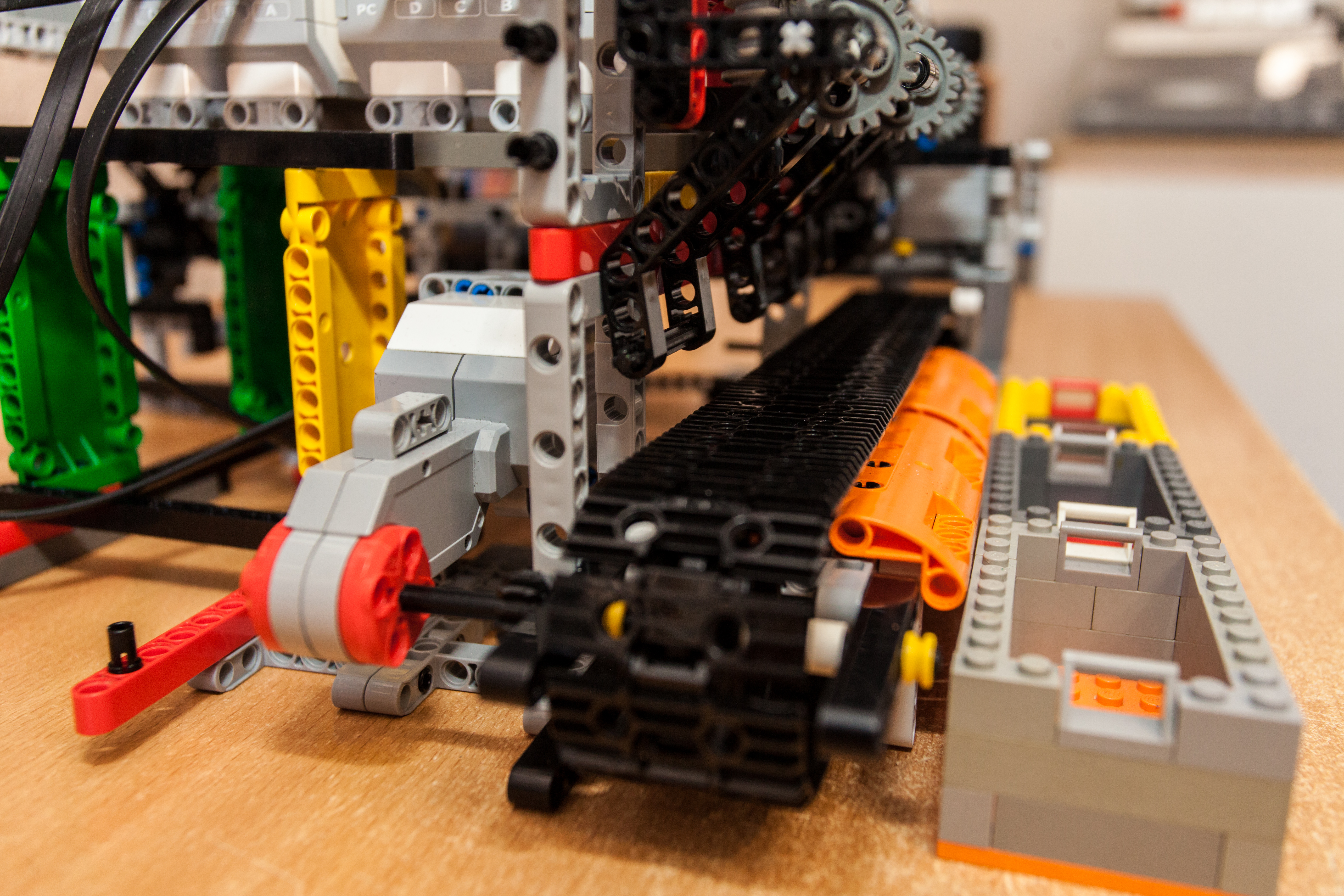
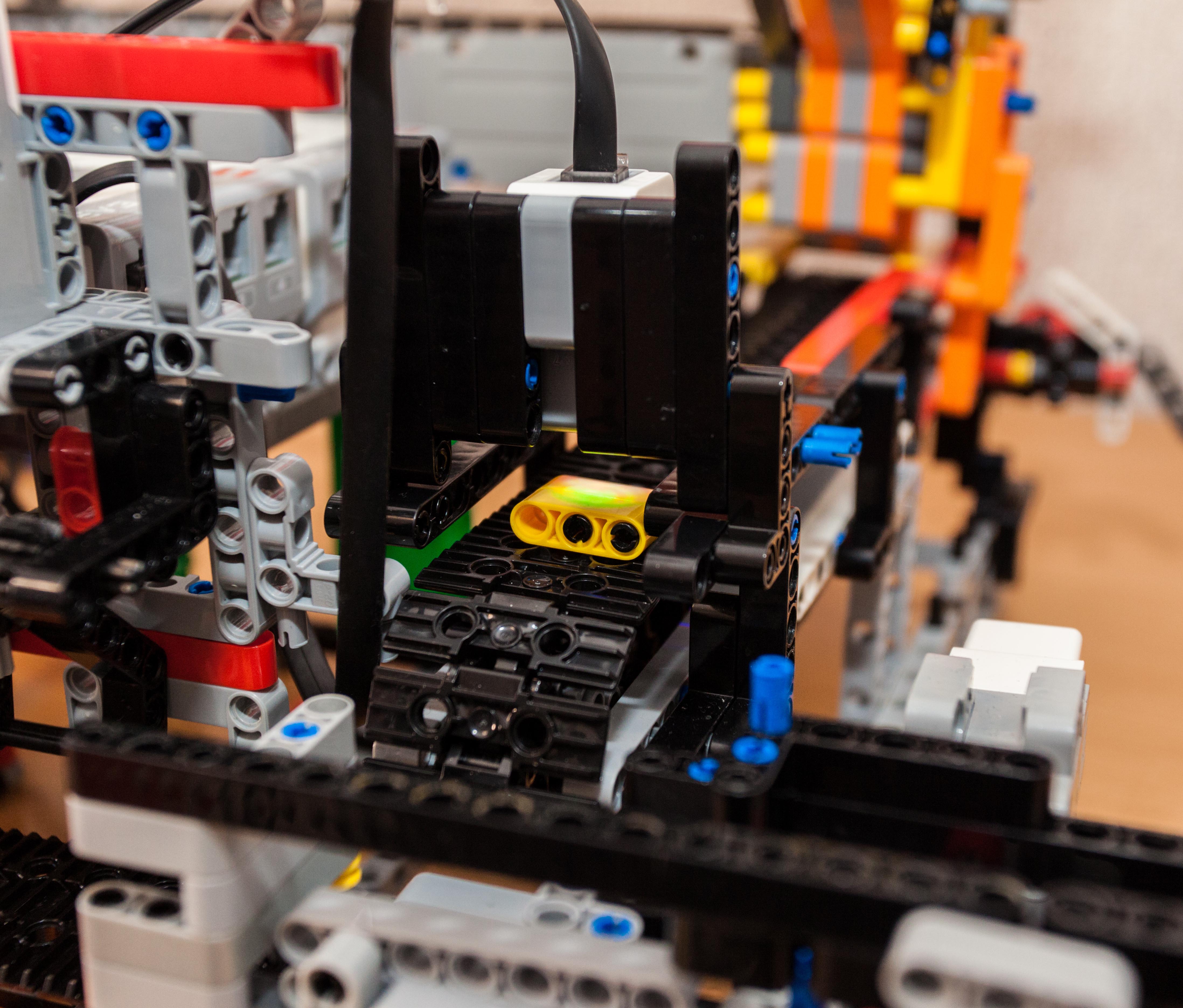
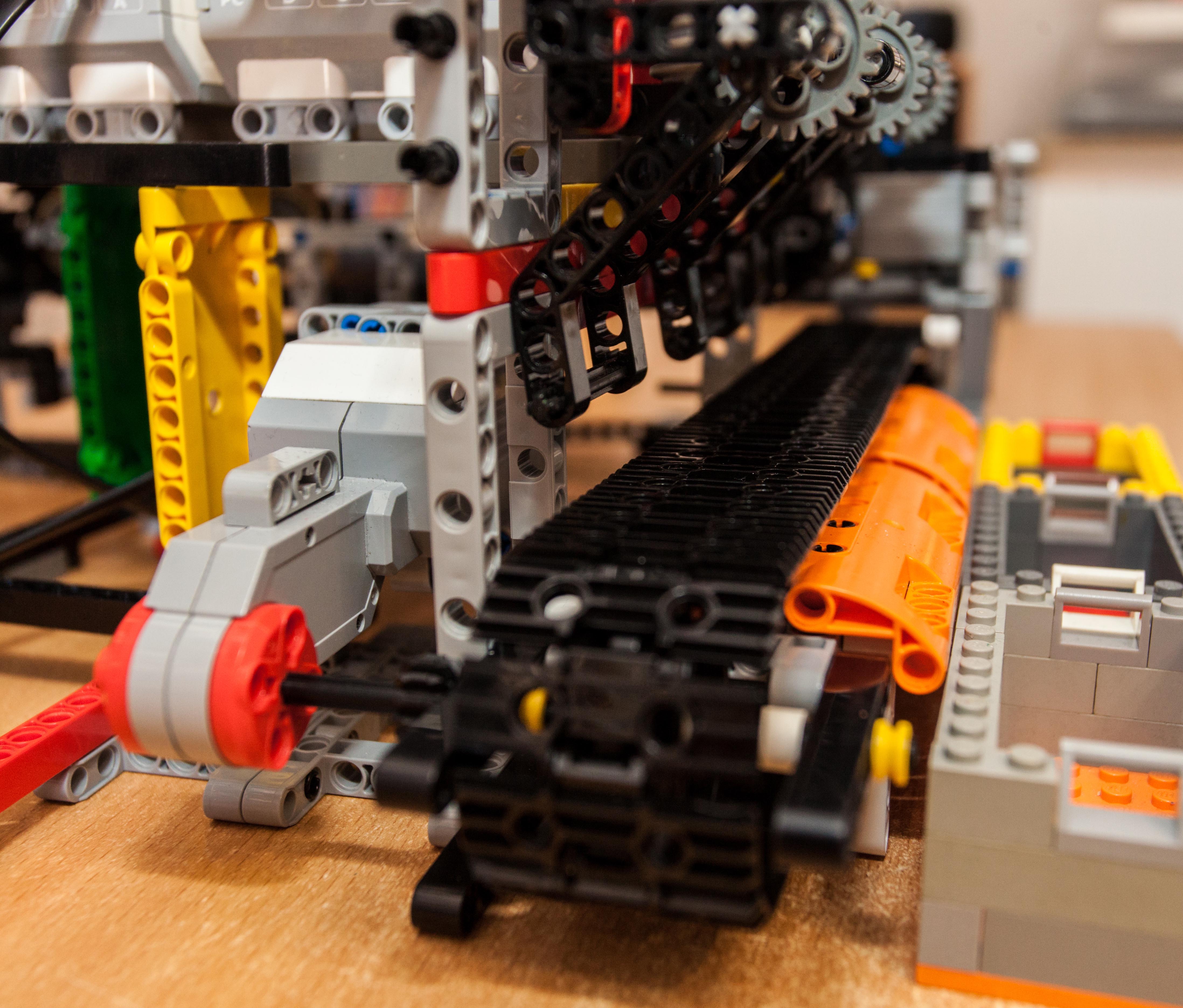
Следующий узел – это лента, изготовленная из пластиковой гусеницы, на которой установлен датчик цвета. Лента приводится в движение «Большим мотором».
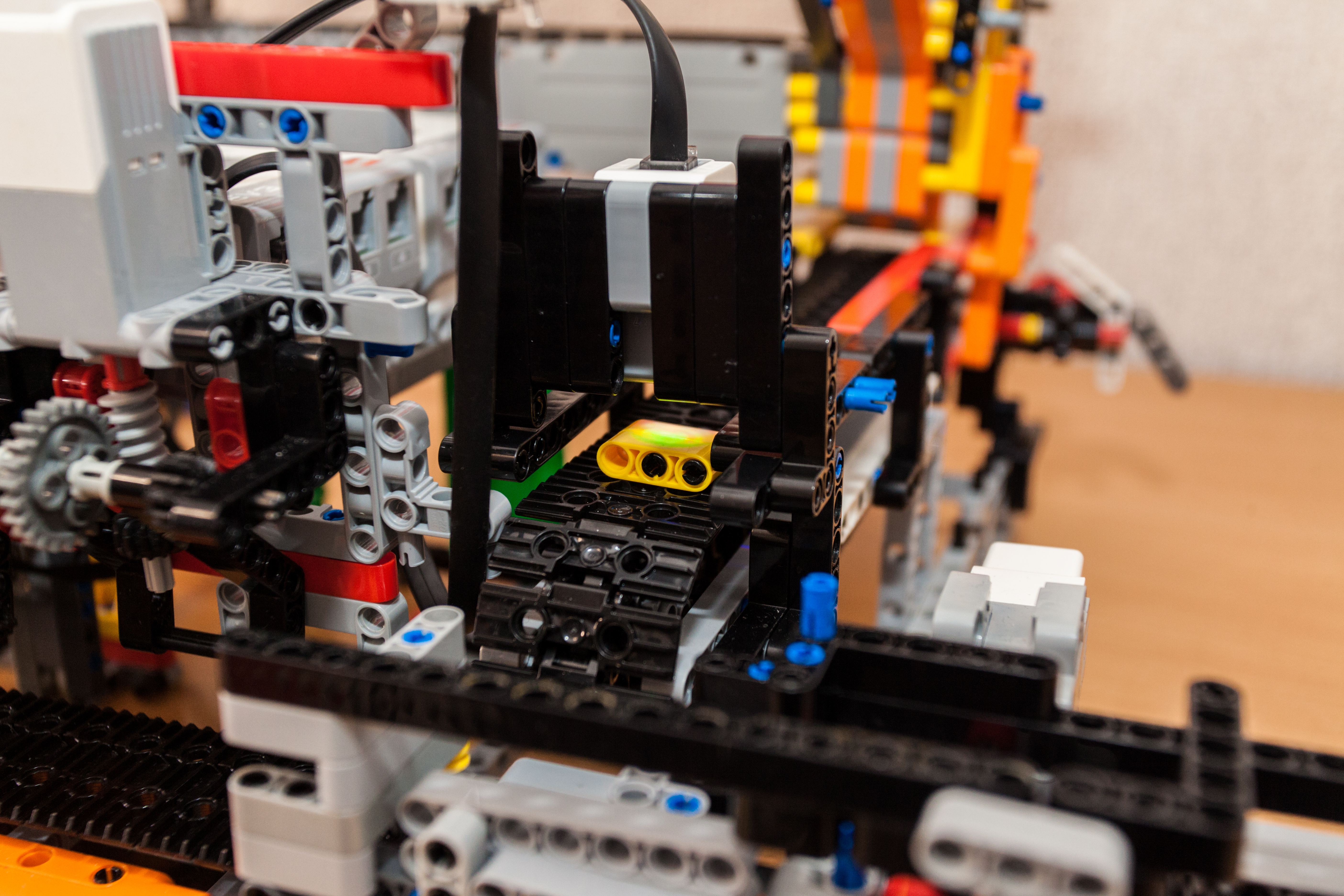
При определении цвета детали, блок, к которому присоединен датчик цвета, по радиоканалу, используя встроенный модуль блютуз, передает цифровой сигнал другому блоку, который управляет этой лентой. Лента движется еще одну секунду и после того как деталь падает в камеру для перемещения, останавливается.
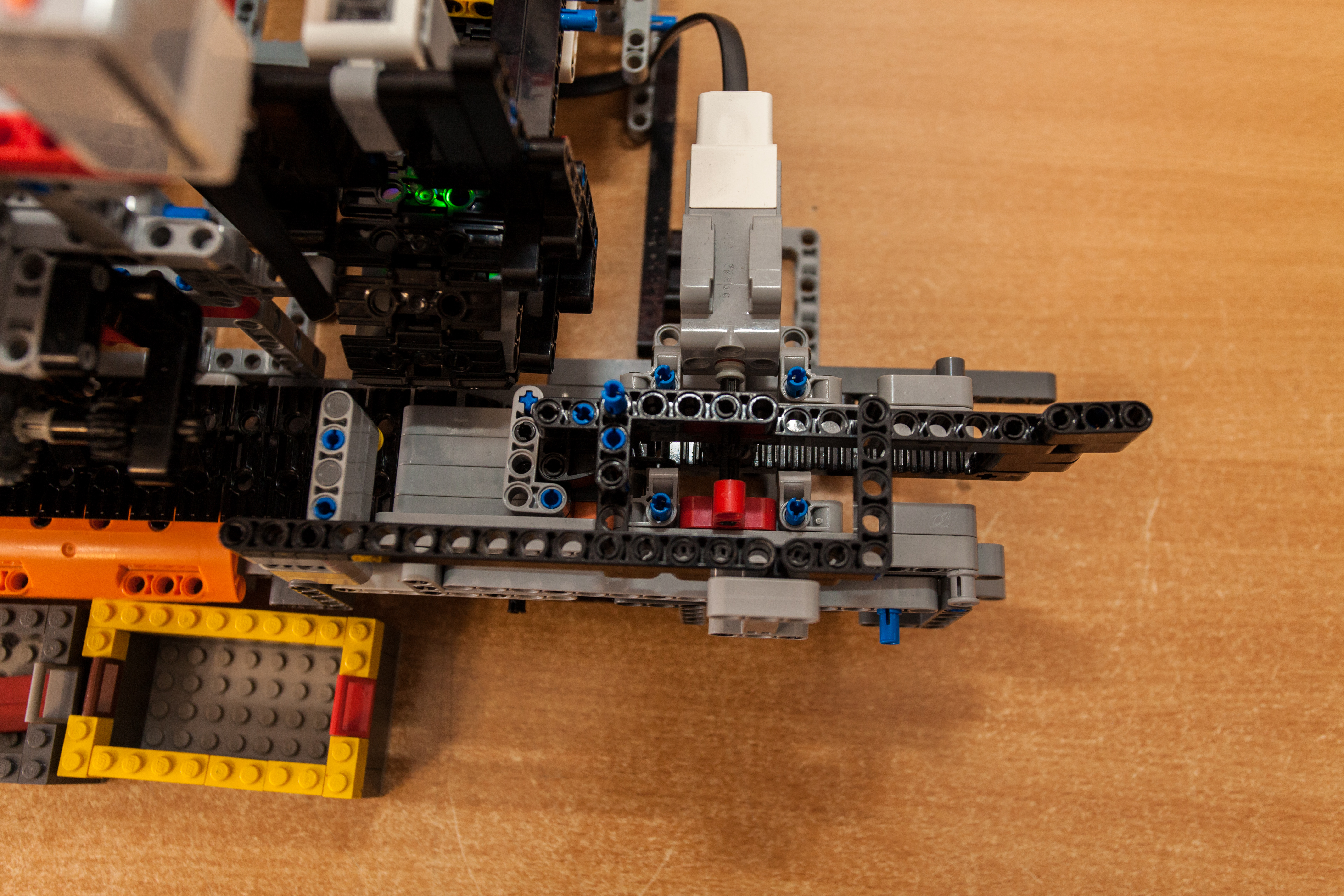
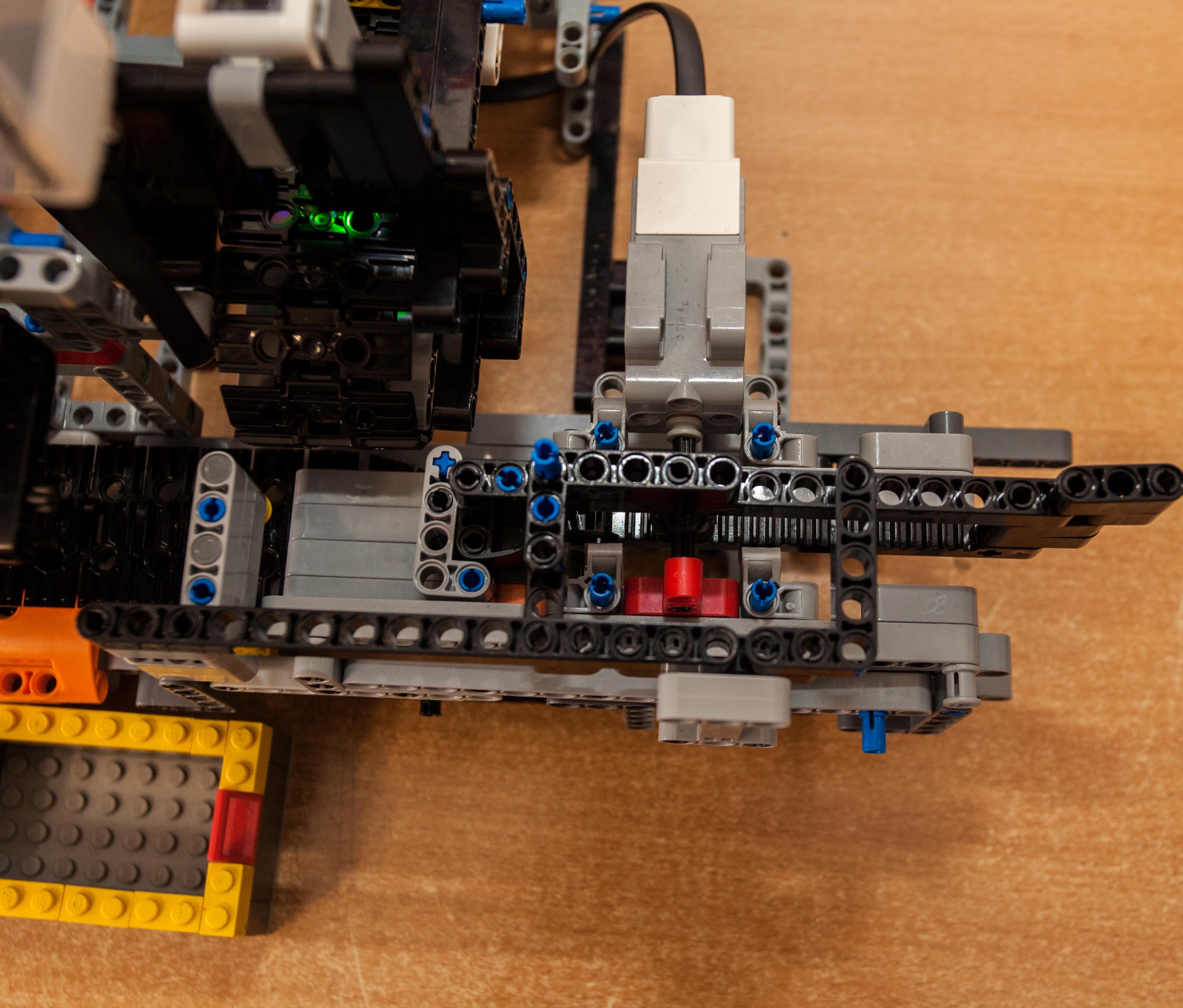
В это время срабатывает «Средний мотор» на узле перемещения детали на основную ленту для перемещения деталей до нужного контейнера. В связи большим расходом деталей для сборки модели, я реализовал определение и сортировку деталей только трех цветов.
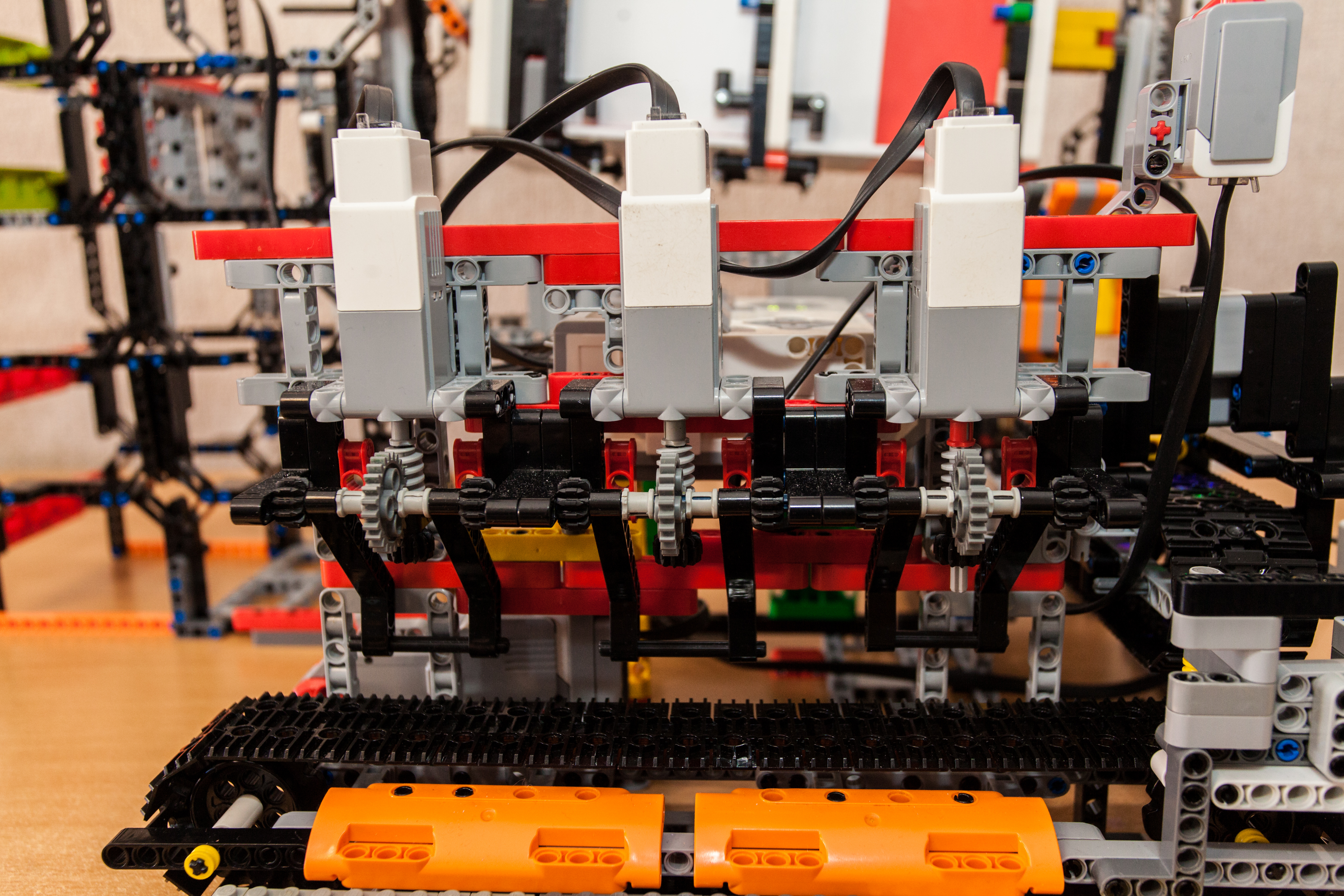
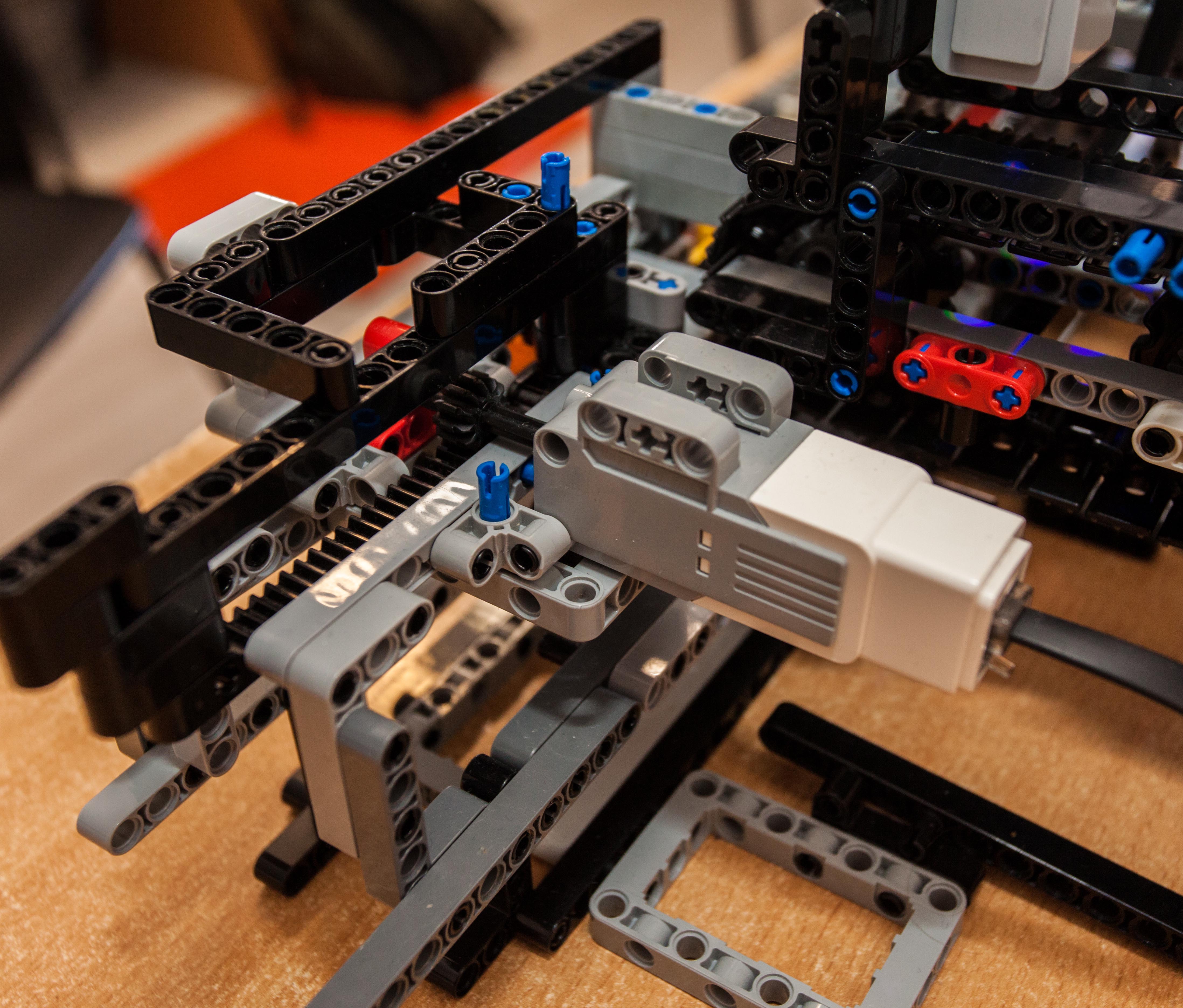
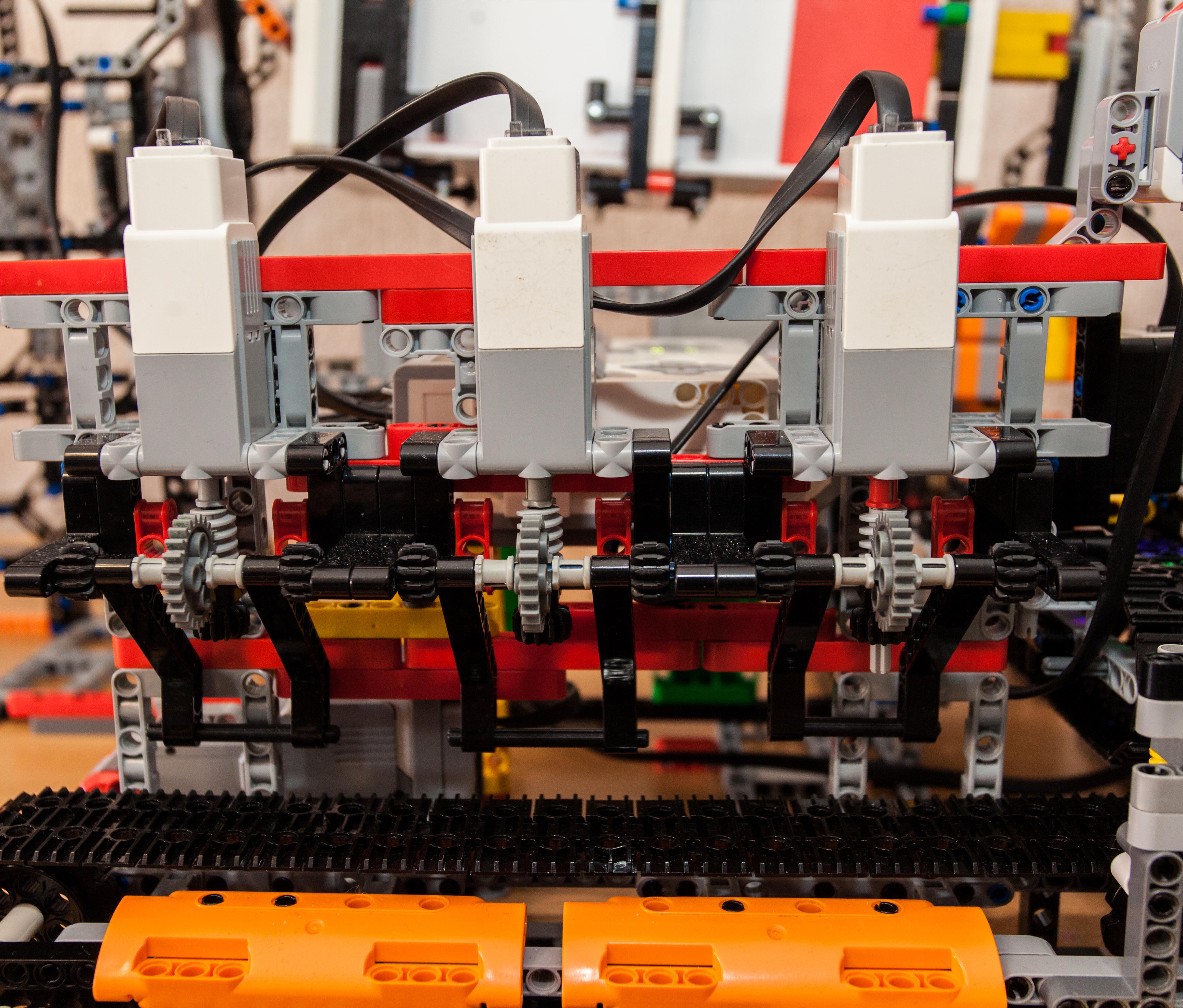
Последний узел в модели состоит из ленты, по которой перемещаются тестовые детали и блоком с тремя моторами, которые в зависимости от цвета детали скидывают деталь в определенные контейнеры, для деталей определенного цвета.
Программное обеспечение написано в среде «Lego» и состоит из двух отдельных программ. Первая программа получает данные о цвете детали с датчика цвета и в зависимости от цвета включает нужный мотор выталкивающий детали в контейнер. Сразу после определения цвета детали программа высылает сообщение второму блоку EVE3, содержащее цифровое значение 2, который останавливает свою ленту и включает мотор в камере перемещения. Через секунду программа высылает сообщение второму блоку EVE3, содержащее цифровое значение 0, для того чтобы задание не повторялось во время перемещения детали по основной ленте.
После сортировки, все детали размещены по своим контейнерам и рассортированы по цветам «типу отходов». Отходы могут быть транспортированы, к месту дальнейшей обработки.
Выводы
В процессе изучения проблемы сортировки мусора, мы познакомились с принципами сортировки мусора и получили информацию о состоянии отрасли в целом. Сортировка и переработка твердых бытовых отходов способствует сохранению окружающей среды, экономии электроэнергии.
Разрабатывая конструкцию, мы получили навыки разработки узлов для конвейерной линии, научились разрабатывать программное обеспечение для работы узлов, обмена сообщениями между блоками управления.
Мы наметили для себя новые направления развития проекта. В модели имеются узлы, которые требуют доработки. Так же требуется больше деталей для придания жесткости модели.
В перспективе мы собираемся переработать модель, применив микрокомпьютер Raspberry Pi и использовать в работе модели компьютерное зрение. Это значительно увеличит скорость работы конструкции, улучшит распознаваемость деталей и откроет путь к созданию рабочей линии для сортировки настоящих отходов.
Библиографический список
- Лоренс Валк «Большая книга Lego Mindstroms» Москва: Издательство «Э» - 2017г. – 408 стр.
- А. П. Фрадкова «Робототехника для детей и родителей» Санкт-Петербург: Издательство «Наука» - 2013 г 319 стр.
- Овсяницкая Л. Ю «Курс программирования робота EV3 в среде Lego Mindstorms EV3» «Перо» 2016 г. – 300 стр.
- Интернет ресурс finexpertiza.ru
- Интернет ресурс rio-polimer.ru
Программное обеспечение
- Microsoft Word 2010
- LEGO Mindstorms EVE3
Файлы
Добавлен 10.12.2024
Добавлен 10.12.2024
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024