РЖ
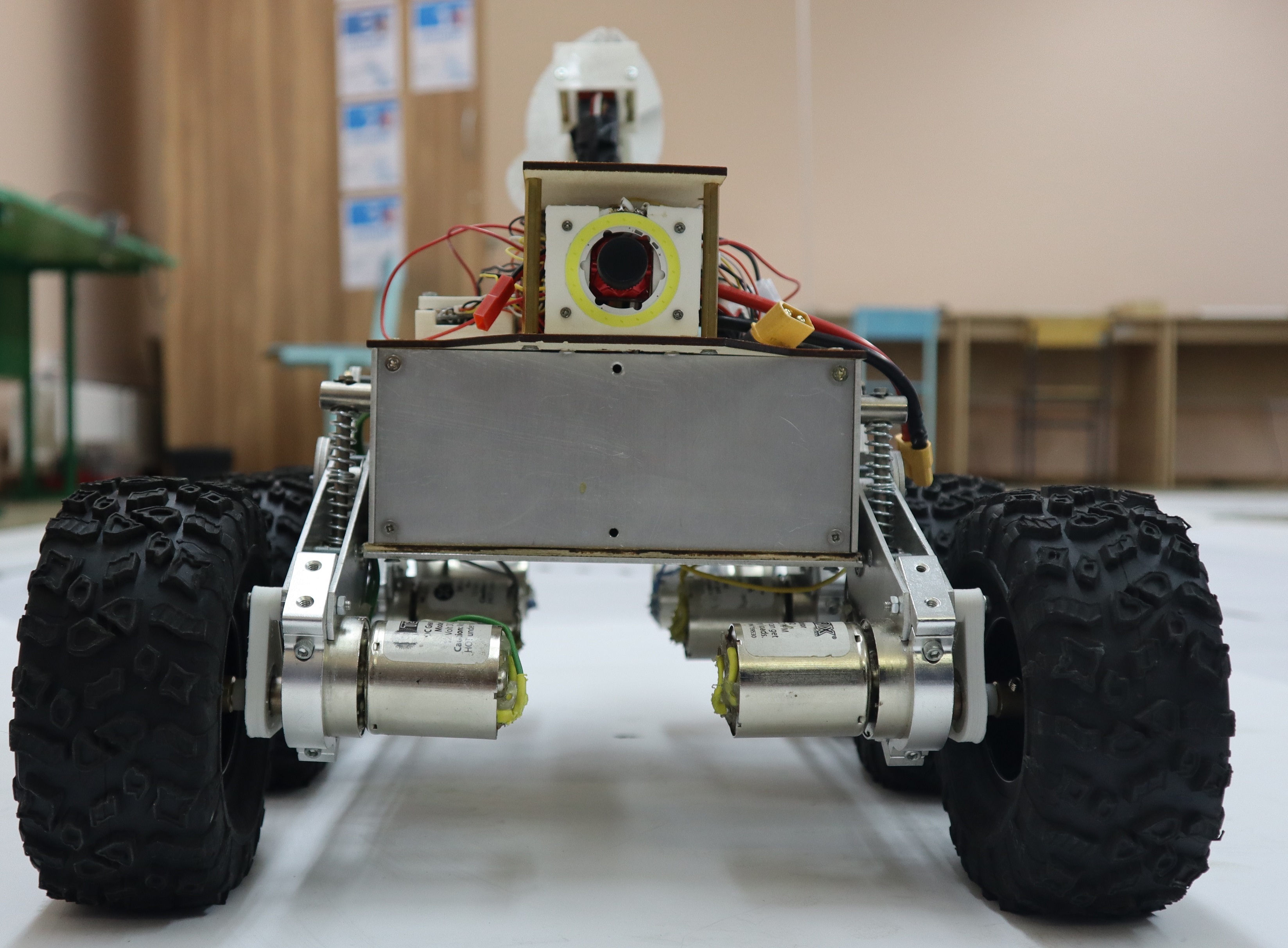
ROB-57203Робот построен на базе микроконтроллера Atmega2560.Дистанционное управление роботом осуществляется по средствам приемника и передатчика FrSKY. Контроль робота в пространстве будет осуществляться с помощью двух камер с двумя приемниками, расположенных в верхней части робота. В роботе используются 6 драйверов двигателя. Использованы шесть моторов с редукторами, которые закреплены с помощью алюминиевого крепления и специальной алюминиевой пластины. Корпус и основные подвижные части изготовлены из алюминия. В конструкции робота используются детали, напечатанные на 3D принтере из белого PLA пластика. Манипулятор построен на базе серво-приводов. Питание робота осуществляется от аккумулятора LiPo 3S. На робот будет добавленна еще одна камера
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024