СТАНОК ДЛЯ ГИБКИ ПРОВОЛОКИ WB - 1.1
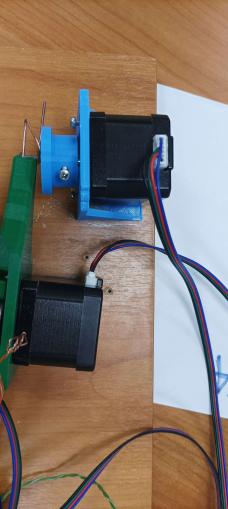
ROB-57848Робот создан на базе микрокомпьютера Arduino, он состоит из: ШИЛДА, Платы Ардуино, 2 моторов NEMA17, подшипника, болтов и печатных деталей( для питания используется ЛБП), 2 драйвера типа 4988
Робот уникален:
1 Простая для замены зап. частей конструкция(модульная), также благодаря этому в робота могут быть установлены дополнительные модули, такие как: Выпрямитель проволоки, Продвинутая гибочная головка которая обеспечивает возможность гибки в 2 стороны, дополнительный мотор, которые обеспечивает возможность гибки в 3 оси, другое “сопло”
2 Гибкостью и простотой кода
3 Высокой прочностью
4 Дешевизной
5 Мощностью
Этот робот, способен помочь в создание ювелирной продукции, на заводах, для изготовления рамок для моторов, пружин и т.д.
Файлы
Добавлен 10.12.2024
Добавлен 10.12.2024
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
Дополнительные файлы
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024