редиска
ROB-58388ВРАТАРЬ
Робот собран на базе робототехнического набора Lego EV3 Mindstorms с использованием возможностей 3D-моделирования и печати, а также лазерной резки.

Контроллер
Микрокомпьютер EV3 входит в состав робототехнических конструкторов Lego Mindstorms Education EV3.
Микрокомпьютер Lego EV3 имеет следующие характеристики:
- Процессор— ARM9
- Микрокомпьютер EV3 имеет операционную систему Linux
- Контроллер блока программирования — ARM9 с частотой 300 МегаГерц
- Объем flash-памяти составляет 16 МБ
- Объем оперативная памяти — 64 МБ
- Модуль EV3 имеет монохромный черно-белый экран с разрешение 178×128 px
- При осуществлении связь с главным компьютером через шину USB 2 .0 скорость передачи данных достигает 480 Мбит/с
- При осуществлении связь с главным компьютером через шину USB 1 .1 скорость передачи данных до 12 Мбит/с
- Карта памяти типа Micro SD с поддержкой SDHC, версии 2 .0. Максимальный объем памяти карты 32 ГБ
- По 4 входных и выходных порты для подключения моторов и датчиков. Датчики опрашиваются со скоростью в 1 Гигагерц
- Соединение осуществляются при помощи кабелей с коннекторами типа RJ12
- Поддерживается автоматическая идентификация сенсоров и моторов
- Электропитание от 6 батареек типа AA или от аккумуляторной батарея
В роботе используется аккумуляторная литий-ионная батарея для микрокомпьютера EV3 10 вольт, емкость 2050 мАч.
Датчик цвета/света EV3

Цифровой датчик, который может определять цвет или яркость света, поступающего в небольшое окошко на лицевой стороне датчика. Этот датчик может работать в трех разных режимах: в режиме «Цвет», в режиме «Яркость отраженного света» и в режиме «Яркость внешнего освещения». Работает датчик с частотой дискретизации 1 килогерц.
Используется в роботах для определения белой разметки на поле.
HiTechnic Compass V2

Датчик компаса - это цифровой компас, который измеряет магнитное поле Земли и выдает значение, представляющее текущий курс. Магнитный курс рассчитывается с точностью до 1 ° и возвращается как число от 0 до 359. Датчик магнитного компаса обновляет курс 100 раз в секунду.
Во время подготовки к соревнованиям команда проводила эксперимент, давший понять, что постоянный опрос компаса замедляет работу контроллера. Поэтому опрос данного датчика в нападающем (дифференциальный робот) осуществляется только при наличии мяча в лунке или для «подворотов» при близком расположении мяча. Для омни-бота, опрос датчика осуществляется постоянно, позволяя удерживать при движении направление на вражеские ворота.

HiTechnic IrSeeker
Датчик IRSeeker V2 (версия 2) - это многоэлементный инфракрасный детектор, который обнаруживает инфракрасные сигналы от таких источников, как футбольный мяч HiTechnic IRBall, инфракрасные пульты дистанционного управления и солнечный свет. IRSeeker V2 со специально разработанным изогнутым объективом и пятью внутренними детекторами имеет угол обзора 240 градусов.
Для более точно подъезда к мячу нападающего датчик поставлен немного под углом, таким образом движение осуществляется по 6 зоне, вратарь использует более широкую 5 зону.
Моторы

Особенности сервомотора EV3 – содержит в себе встроенный датчик вращения с разрешением в 1 градус для точного контроля угла вращения. Большой мотор оптимизирован для приводных механизмов роботизированных платформ различных видов и назначений.
Скорость вращения большого мотора 160 - 170 оборотов в минуту. Вращающий момент 20 ньютон/метр.

Средний сервомотор EV3 отлично подойдет для работы под низкими нагрузками и высокими скоростями.
Основные характеристики среднего сервомотора EV3:
Максимальные обороты: 240- 250 об\мин. Заданный крутящий момент - 12 Н/см. Реальный крутящий момент - 8 Н/см.
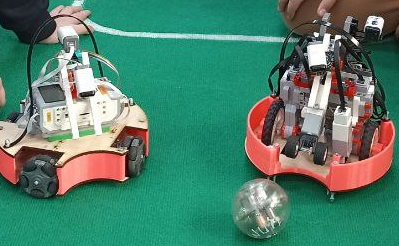
Изначально был создан вратарь дифференциальным роботом, но после серии игр мы приняли решение заменить его на омни –бота.
Первый вариант омни-бота был полностью разработан на основе конструктора EV3. К сожалению, такая конструкция была не очень прочная, поэтому мы решили разработать жесткий каркас для вратаря.
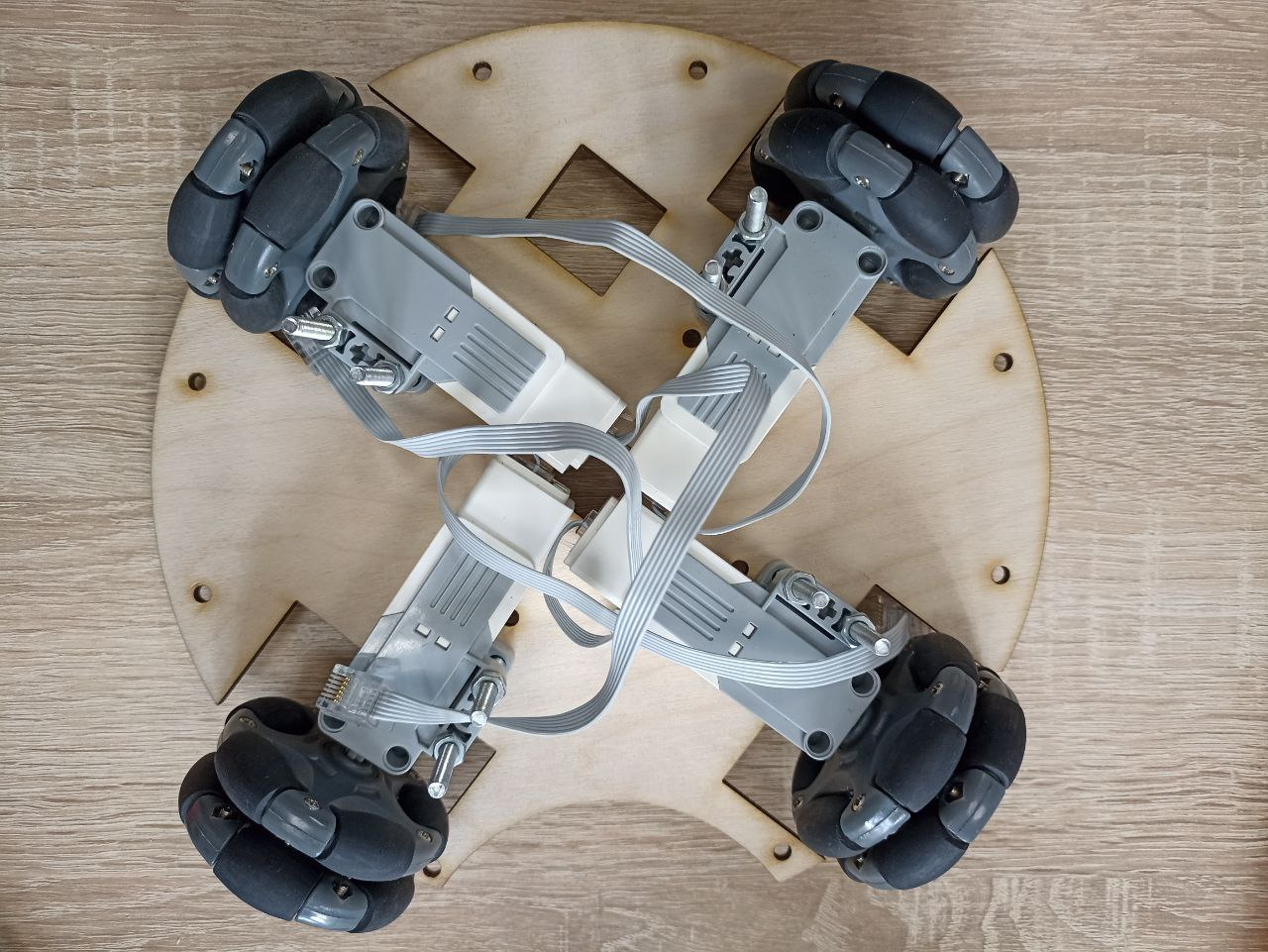
Основной проблемой при конструировании робота было размещение моторов на основе. Не раз мы ошибались в расчетах креплений, но шуроповерт нас спасал)…
Мы отказались от датчика определения мяча в лунке, так как основной задачей вратаря является защита ворот, четкий подъезд к мячу и его выбивание.
Освободившийся порт мы планируем использовать для контроля расстояния до ворот как дополнительная защита от полного заезда в штрафную зону.
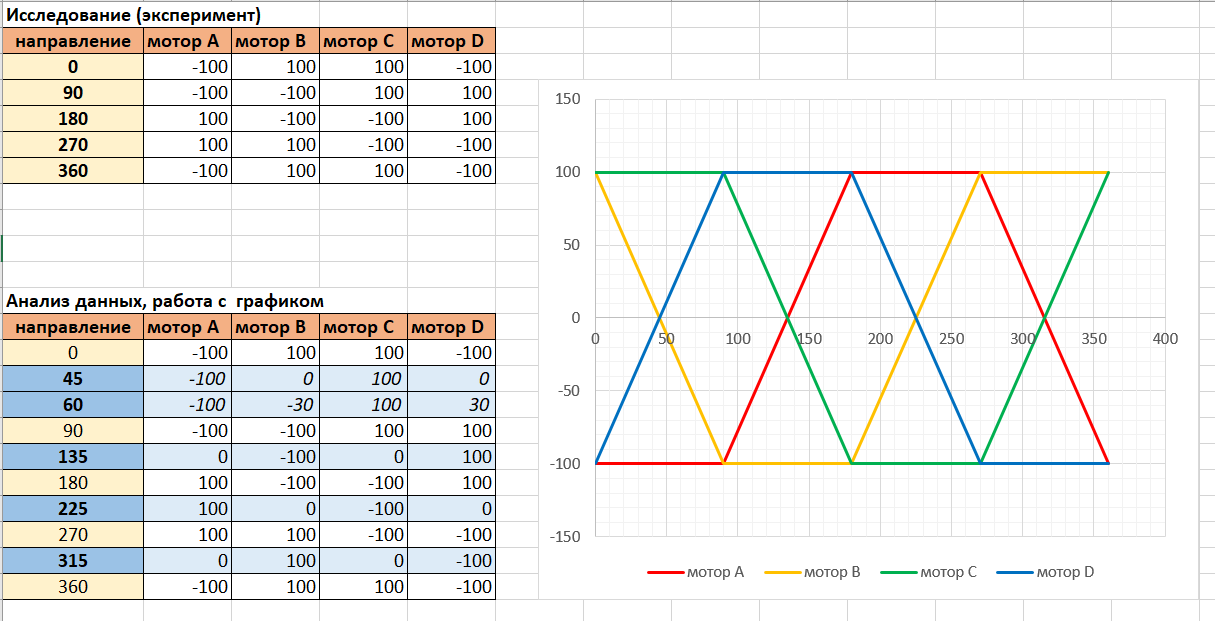
Основной сложностью было правильно запрограммировать движение робота без использования тригонометрии. Мы провели серию экспериментов, проанализировали графики и нашли зависимость от направления вращения моторов (в сочетании) и движением робота. В программе с помощью ветвления описываем все случаи движения.