Горе луковое
ROB-58389Робот собран на базе робототехнического набора Lego EV3 Mindstorms с использованием возможностей 3D-моделирования и печати, а также лазерной резки.

Контроллер
Микрокомпьютер EV3 входит в состав робототехнических конструкторов Lego Mindstorms Education EV3.
Микрокомпьютер Lego EV3 имеет следующие характеристики:
- Процессор— ARM9
- Микрокомпьютер EV3 имеет операционную систему Linux
- Контроллер блока программирования — ARM9 с частотой 300 МегаГерц
- Объем flash-памяти составляет 16 МБ
- Объем оперативная памяти — 64 МБ
- Модуль EV3 имеет монохромный черно-белый экран с разрешение 178×128 px
- При осуществлении связь с главным компьютером через шину USB 2 .0 скорость передачи данных достигает 480 Мбит/с
- При осуществлении связь с главным компьютером через шину USB 1 .1 скорость передачи данных до 12 Мбит/с
- Карта памяти типа Micro SD с поддержкой SDHC, версии 2 .0. Максимальный объем памяти карты 32 ГБ
- По 4 входных и выходных порты для подключения моторов и датчиков. Датчики опрашиваются со скоростью в 1 Гигагерц
- Соединение осуществляются при помощи кабелей с коннекторами типа RJ12
- Поддерживается автоматическая идентификация сенсоров и моторов
- Электропитание от 6 батареек типа AA или от аккумуляторной батарея
В роботе используется аккумуляторная литий-ионная батарея для микрокомпьютера EV3 10 вольт, емкость 2050 мАч.
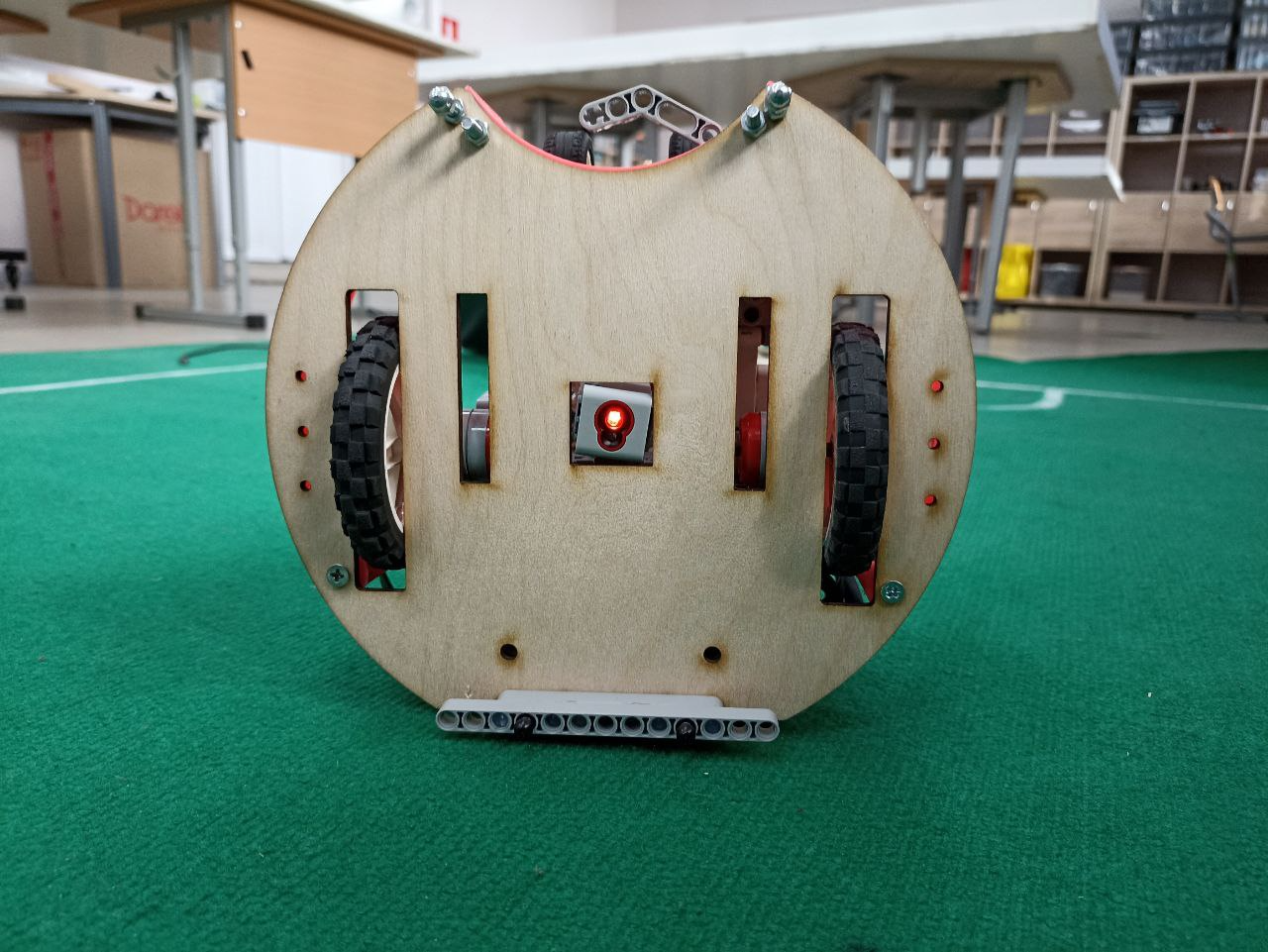
Датчик цвета/света EV3

Цифровой датчик, который может определять цвет или яркость света, поступающего в небольшое окошко на лицевой стороне датчика. Этот датчик может работать в трех разных режимах: в режиме «Цвет», в режиме «Яркость отраженного света» и в режиме «Яркость внешнего освещения». Работает датчик с частотой дискретизации 1 килогерц.
Используется в роботах для определения белой разметки на поле.
HiTechnic Compass V2

Датчик компаса - это цифровой компас, который измеряет магнитное поле Земли и выдает значение, представляющее текущий курс. Магнитный курс рассчитывается с точностью до 1 ° и возвращается как число от 0 до 359. Датчик магнитного компаса обновляет курс 100 раз в секунду.
Во время подготовки к соревнованиям команда проводила эксперимент, давший понять, что постоянный опрос компаса замедляет работу контроллера. Поэтому опрос данного датчика в нападающем (дифференциальный робот) осуществляется только при наличии мяча в лунке или для «подворотов» при близком расположении мяча. Для омни-бота, опрос датчика осуществляется постоянно, позволяя удерживать при движении направление на вражеские ворота.

HiTechnic IrSeeker
Датчик IRSeeker V2 (версия 2) - это многоэлементный инфракрасный детектор, который обнаруживает инфракрасные сигналы от таких источников, как футбольный мяч HiTechnic IRBall, инфракрасные пульты дистанционного управления и солнечный свет. IRSeeker V2 со специально разработанным изогнутым объективом и пятью внутренними детекторами имеет угол обзора 240 градусов.
Для более точно подъезда к мячу нападающего датчик поставлен немного под углом, таким образом движение осуществляется по 6 зоне, вратарь использует более широкую 5 зону.
Моторы

Особенности сервомотора EV3 – содержит в себе встроенный датчик вращения с разрешением в 1 градус для точного контроля угла вращения. Большой мотор оптимизирован для приводных механизмов роботизированных платформ различных видов и назначений.
Скорость вращения большого мотора 160 - 170 оборотов в минуту. Вращающий момент 20 ньютон/метр.

Средний сервомотор EV3 отлично подойдет для работы под низкими нагрузками и высокими скоростями.
Основные характеристики среднего сервомотора EV3:
Максимальные обороты: 240- 250 об\мин. Заданный крутящий момент - 12 Н/см. Реальный крутящий момент - 8 Н/см.
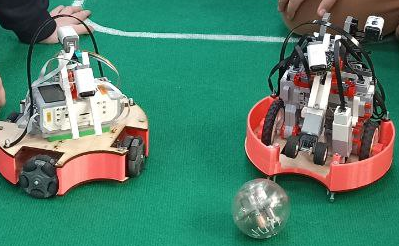
НАПАДАЮЩИЙ
В качестве нападающего был выбран дифференциальный робот, так как для его программирования не требуется знаний по тригонометрии. Основа робота была смоделирована и вырезана на лазерном станке из фанеры 4 мм, защита робота и лунка были распечатаны на 3D-принтере.
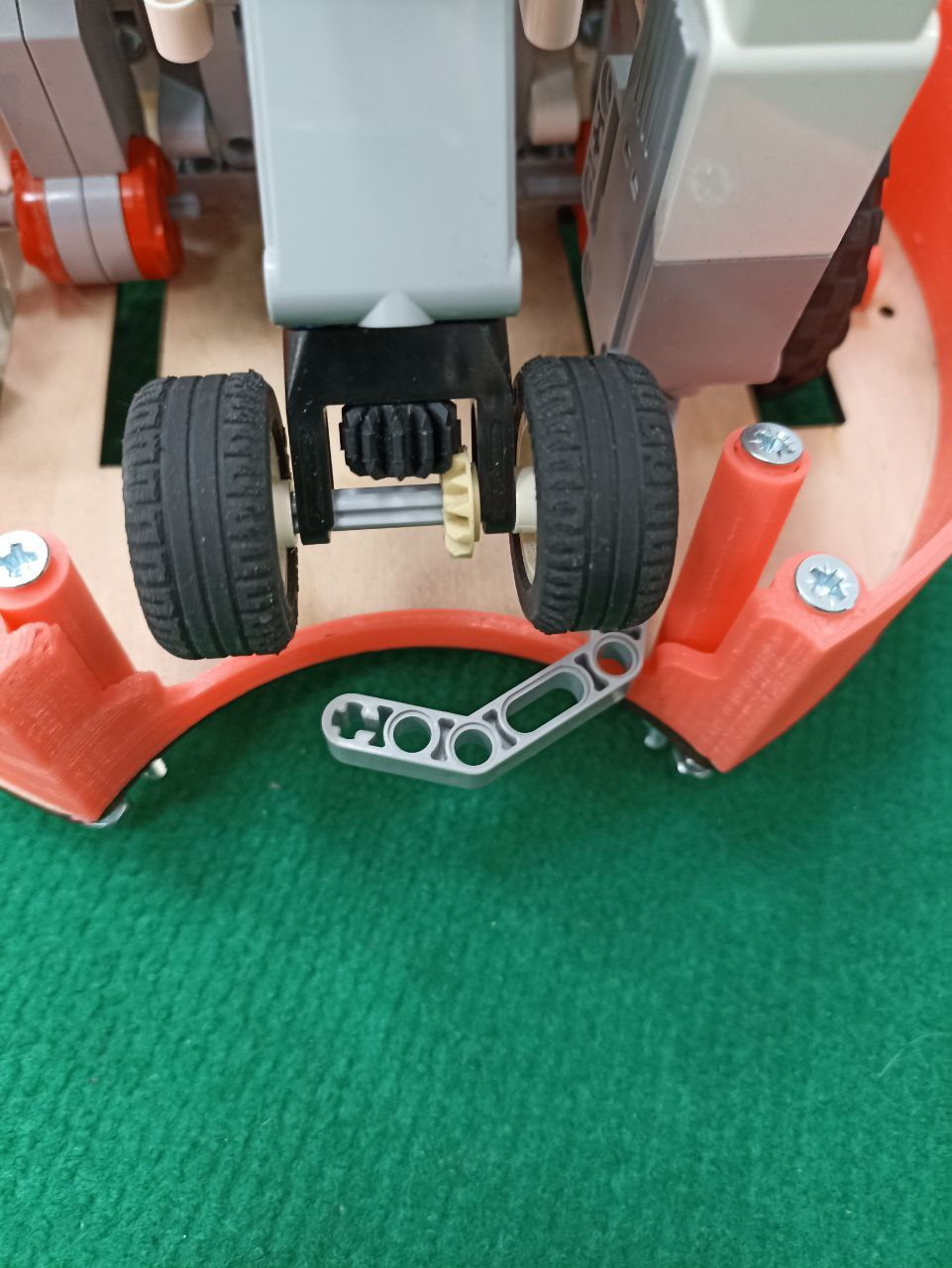
В конструкции робота используются два больших сервопривода EV3 и два средних.
Перемещается робот с помощью двух больших сервоприводов и обычных колес 81.6 мм диаметром. Робот оснащен двумя ведущими колесами, которые установлены на противоположных сторонах шасси. Управлять направлением движения можно с помощью разности скорости вращения ведущих колес.
Дриблинг и ударный механизм
Важной характеристикой нападающего является возможность захвата-удержания мяча и осуществление удара по воротам противника.
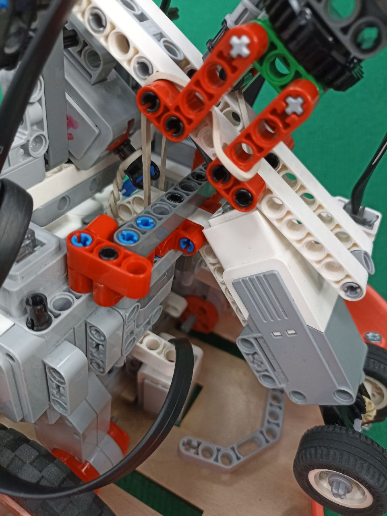
Нашей командой был разработан подвижный механизм по захвату и ведению мяча, в состав которого вошли средний сервопривод EV3 и датчик касания EV3.
Когда мяч отсутствует в лунке робота, рычаг, на котором закреплен сервопривод дриблинга, осуществляет нажатие кнопки датчика касания. При захвате мяча, механизм приподнимается и прекращается давление на кнопку. Таким образом, определяется захват роботом мяча и начинается выполняться алгоритм ведения меча к вражеским воротам.
Сервопривод с дриблингом включается только при достижении порогового значения интенсивности датчика IRSeeker, в противном случае мотор остается без движения. Также во время осуществления удара по мячу, изменяется направление вращения дриблинга.
Ударный механизм также был реализован на основе среднего сервопривода EV3. Были проведены небольшие эксперименты и выбрана одна из возможных оптимальных высот нанесения удара по мячу. К сожалению, удар в нижнюю часть мы пока осуществить не смогли.