TILT
ROB-58401Одним из основных требований в современной робототехнике является переход к автономным робототехническим комплексам. Сегодня роботы стали приоритетным направлением любой отрасли, в том числе и спасательных операций.
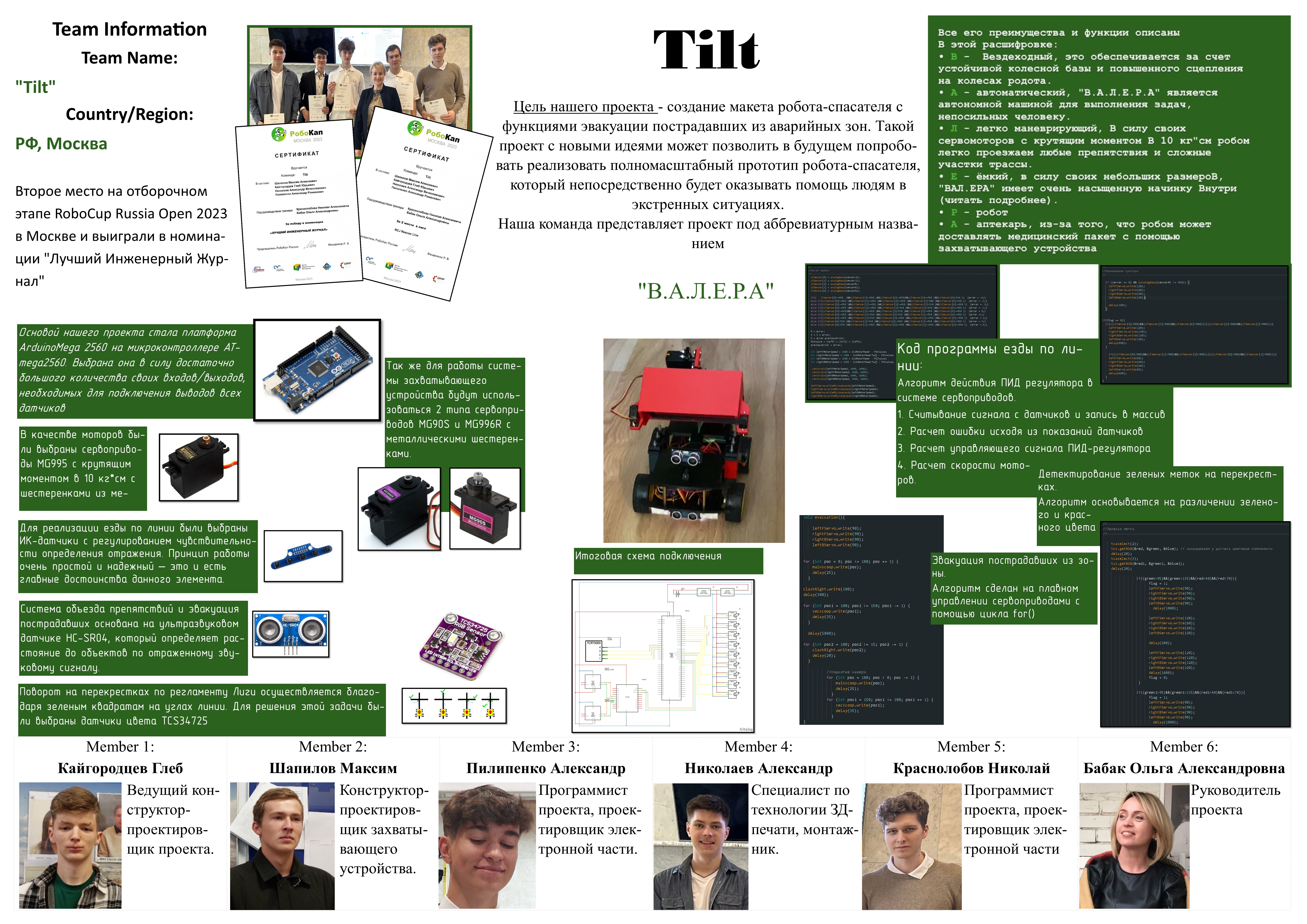
Наша команда представляет проект под аббревиатурным названием "В.А.Л.Е.Р.А". Все его преимущества и функции описаны в этой расшифровке:
В - вездеходный, это обеспечивается за счет устойчивой колесной базы и повышенного сцепления на колесах робота.
А - автоматический, "В.А.Л.Е.Р.А" является полностью автономной машиной для выполнения задач, непосильных человеку.
Л - легко маневрирующий, в силу своих сервомоторов с крутящим моментом в 10 кг*см робот легко проезжает любые препятствия и сложные участки трассы.
Е - ёмкий, в силу своих небольших размеров, "В.А.Л.Е.Р.А" имеет очень насыщенную начинку внутри (читать подробнее).
Р - робот
А - аптекарь, из-за того, что робот может доставлять медицинский пакет с помощью захватывающего устройства.
Цель нашего проекта - создание макета робота-спасателя с функциями эвакуации пострадавших из аварийных зон. Такой проект с новыми идеями может позволить в будущем попробовать реализовать полномасштабный прототип робота- спасателя, который непосредственно будет оказывать помощь людям в экстренных ситуациях.
Главными задачами проекта являются:
1 Выбор элементной базы под проектируемые задачи
2. Схемы подключения электроники проекта
2.1. Преобразователи напряжения DC-DC, их функции и назначение
3. Спроектировать 3Д-модель основания робота
4. Разработать 3Д-модель захватывающего устройства (ковша)
5. Обоснованно выбрать вид пластика для печати
6. Подготовить 3Д-модели к печати на 3Д- принтере
7. Сборка всех частей робота
7.1. Сборка корпуса
7.2. Подключение электроники и датчиков
8. Этап программирования робота
9. Отладка программы
10. Исправление выявленных ошибок
В элементую базу "В.А.Л.Е.Р.А" входят следующие компоненты: Arduino Mega 2560, MG995, IR-sensor, HC-SR04, TCS34725, MG90S, MG996R, DC-DC converter.
Во время подготовки робота к заданиям лиги Rescue Line, команда вспомнила и закрепила знания и умения во всех областях создания роботов таких как
- Проектирование в 3Д-системах
- Подготовка модели к 3Д-печати
- Сборка робота
- Программирование робота
- Отладка программы
В будующих работах планируется перейти на усовершенствованную систему на плате Raspberry Pi 3B и попытаться изучить ComputerVision.
Файлы
Добавлен 22.11.2024
Добавлен 22.11.2024
{kind=link}
Добавлен 22.11.2024