NEU_Race_Rally
ROB-59202小车外观:
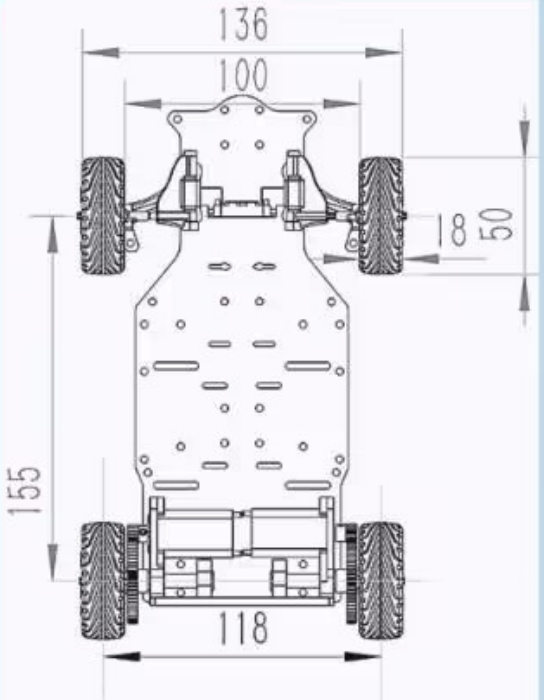
购置的车模底盘,自行加装了180电机、1024线编码器、S-U400舵机,控制方面采用英飞凌的ARM架构TC264为主控微处理器,搭配灰度摄像头实现对赛道的检测及跟随。
(后期伴随调试过程中可能会进行适当改动)
传感器:

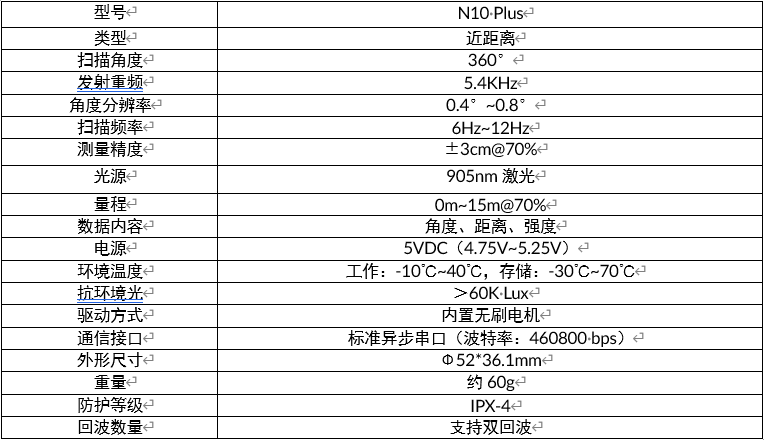
小型激光雷达以判断自身位置实现避障循迹
原理:
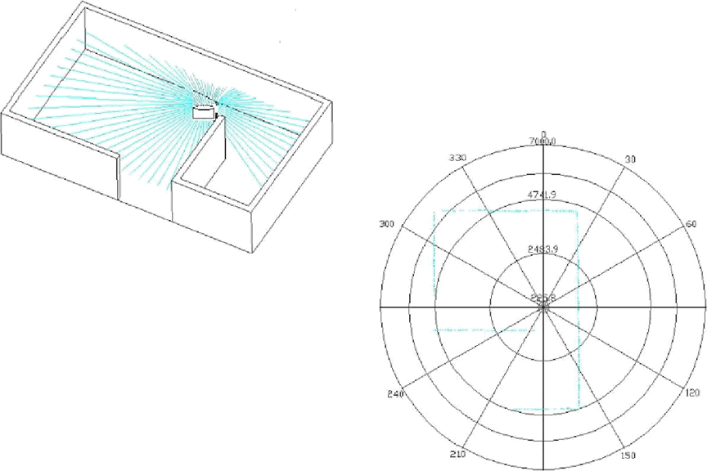
通过单线雷达检测周围360度环境的距离来构建地图,记录特定角度范围内的采样点返回距离值,根据距离值判断自身位置进行相应直行或转弯操作。
涉及知识:
单片机程序设计,运用c语言编写底层数据获取和解析的代码;
自动控制,利用控制算法控制小车平稳前进和转向;
地图构建、路径搜索,通过雷达检测环境信息并规划合理的路线。
其他:
在调试过程中发现此类小型激光雷达的精度难以保证,所以会考虑尝试串联数个单点测距模块,在保证数据采集速率的同时提高数据精度。并编写更为精准的基于测距的位置姿态推演及避障循迹逻辑,以实现更快的速度完成赛项。
通过单线雷达检测周围360度环境的距离来构建地图,记录特定角度范围内的采样点返回距离值,根据距离值判断自身位置进行相应直行或转弯操作。
涉及知识:
单片机程序设计,运用c语言编写底层数据获取和解析的代码;
自动控制,利用控制算法控制小车平稳前进和转向;
地图构建、路径搜索,通过雷达检测环境信息并规划合理的路线。
其他:
在调试过程中发现此类小型激光雷达的精度难以保证,所以会考虑尝试串联数个单点测距模块,在保证数据采集速率的同时提高数据精度。并编写更为精准的基于测距的位置姿态推演及避障循迹逻辑,以实现更快的速度完成赛项。