Складской робот
ROB-60318У робота есть несколько датчиков, это датчики расстояния и цвета
Датчики цвета расположены внизу робота, с помощью датчиков робот
двигается по линии. Если правый датчик цвета видит белый цвет, то он
поворачивает вправо. Если левый датчик цвета видит белый цвет то он
поворачивает влево. По бокам у робота расположены датчики расстояния, с их
помощью робот понимает. если слева и справа контейнеры, которые нужно
отсортировать.
Робот считает перекрестки при помощи датчиков цвета, если датчики
цвета находятся на чёрном цвете, то он считает перекресток
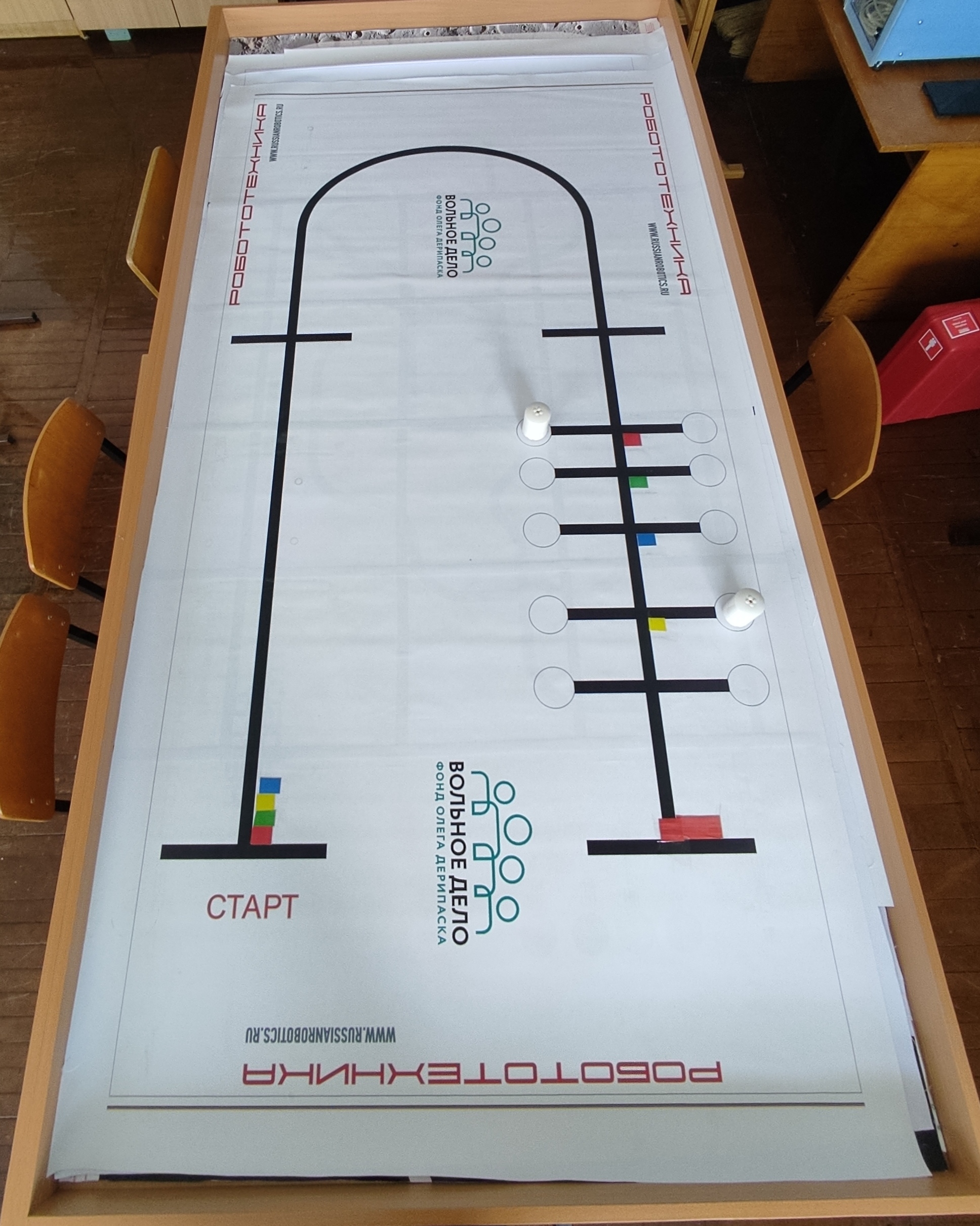
Трасса
Робот должен двигаться по определенной траектории с помощью
датчиков цвета. Затем перед вторым перекрестком он должен снизить скорость
чтобы не задевать грузы. Второй перекресток определяет положение склада на
трассе. Потом при помощи датчиков расстояния робот определяет с обеих
сторон на каждом перекрестке расположение контейнеров с грузом. Робот
останавливается на перекрестке, и начинает измерять расстояние с помощью
каждого датчика с обеих сторон:
1. Если слева есть контейнер с грузом. а справа его нет. то робот
выполняет процедуру захвата груза
2. Если справа есть контейнер с грузом. а слева его нет. То робот выполняет процедуру захвата груза.
З. Если с обеих сторон есть контейнеры, то робот случайным образом
выбирает один из контейнеров и выполняет процедуру захвата
После того. как робот забрал нужный контейнер с грузом. он
выполняет
движение по линии в зону финиша.
Сборка
Робот имеет два больших мотора для перемещения и поворотов, еще
один малый мотор для того, чтобы разжимать захват и контейнеры
перемешались роботом. Робот имеет четыре датчика, два из которых, это
датчики определения линии и цвета, другие два датчика определяют
расстояние.
Алгоритм
Робот двигается по линии до зоны склада. B зоне склада робот
двигается с меньшей скоростью, чтобы не задеть вокруг себя окружающие
предметы. и более точно определять контейнеры. После того как робот нашёл
нужный перекрёсток он с помощью датчиков расстояния определяет: есть ли
слева и справа от него контейнеры и на каком расстоянии они находятся от
него. Робот забирает нужный контейнер с собой и везёт его к зоне выгрузки
Программа состоит из 3 блоков Первый блок это движение робота до
склада.
В этом блоке робот считает перекрестки и двигается по линии. Второй блок
отвечает за нахождение контейнеров и их захват. В третьем блоке робот
двигается до финиша
Файлы
Добавлен 10.12.2024
Дополнительные файлы
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024
Добавлен 10.12.2024