Килька
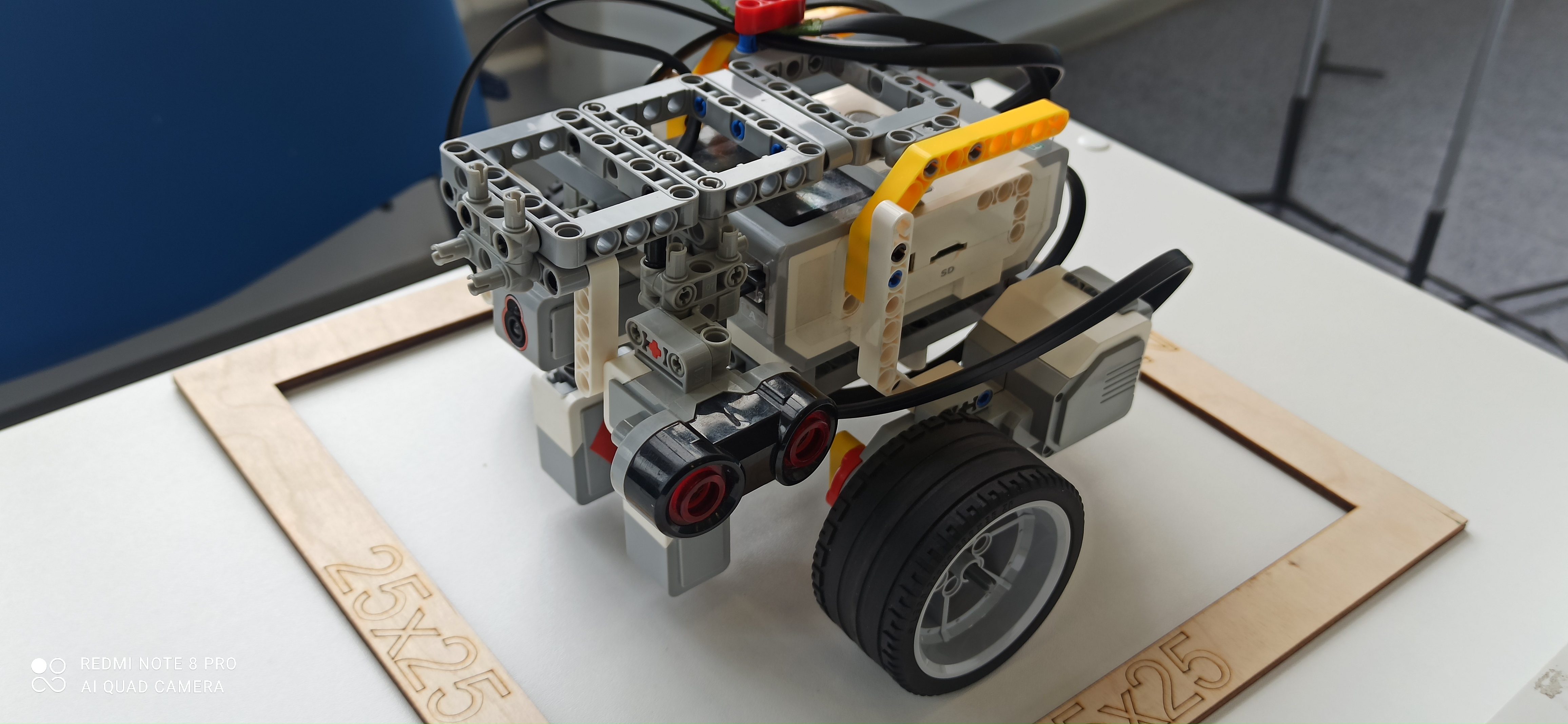
ROB-61119Робот “Килька”. Сконструирован из образовательного конструктора LEGO Mindstorms EV3. В конструкции робота, для выполнения регламента Большое путешествие были использованы большие моторы с большими колесами. Такая конструкция позволяет преодолеть горку, которая достаточно крутая на подъем. Для преодоления всей трассы были использованы три датчика цвета и один датчик ультразвука. Датчики цвета использовались для следования по линии и определения препятствия перед роботом. Датчики цвета использовались в режиме работы “Яркость отраженного света”. При измении показаний яркости два датчика цвета которые расположены внизу автоматически, при помощи формулы П регулятора, позволяли производить корректировку движения робота при движении вдоль линии. Для преодоления лабиринта использовался датчик ультразвука. Робот двигался в лабиринте по правилу правой руки. Это конечно более простой алгоритм, но зато он гарантированно позволяет роботу найти выход из дабиринта
{kind=link}
{kind=link}
{kind=link}