CyberGuide-Dog
ROB-25934CyberGuide-Dog
Киберсобака-поводырь
Этот робот поможет людям, оставшимся без зрения.
Подготовить собаку-поводыря стоит огромных усилий и денег, и за ней надо ухаживать. Этот прототип на Lego Mindostorms ev3 стоит уже гораздо меньше, доступен сразу же, не требует ухода, и даёт пользователю даже больше информации об окружающе мире, чем собака.
Конструкция
У здорового человека 5 органов чувств. У слепого зрения нет. Робот отправляет человеку зрительную информацию через другие органы чувств, которые у него работают.
Задача собаки-поводыря - остановить хозяина, сев перед препятствием. Киберсобака-поводырь измеряет расстояние до препятствия с помощью ультразвукового сенсора, и сообщает эту информацию хозяину.
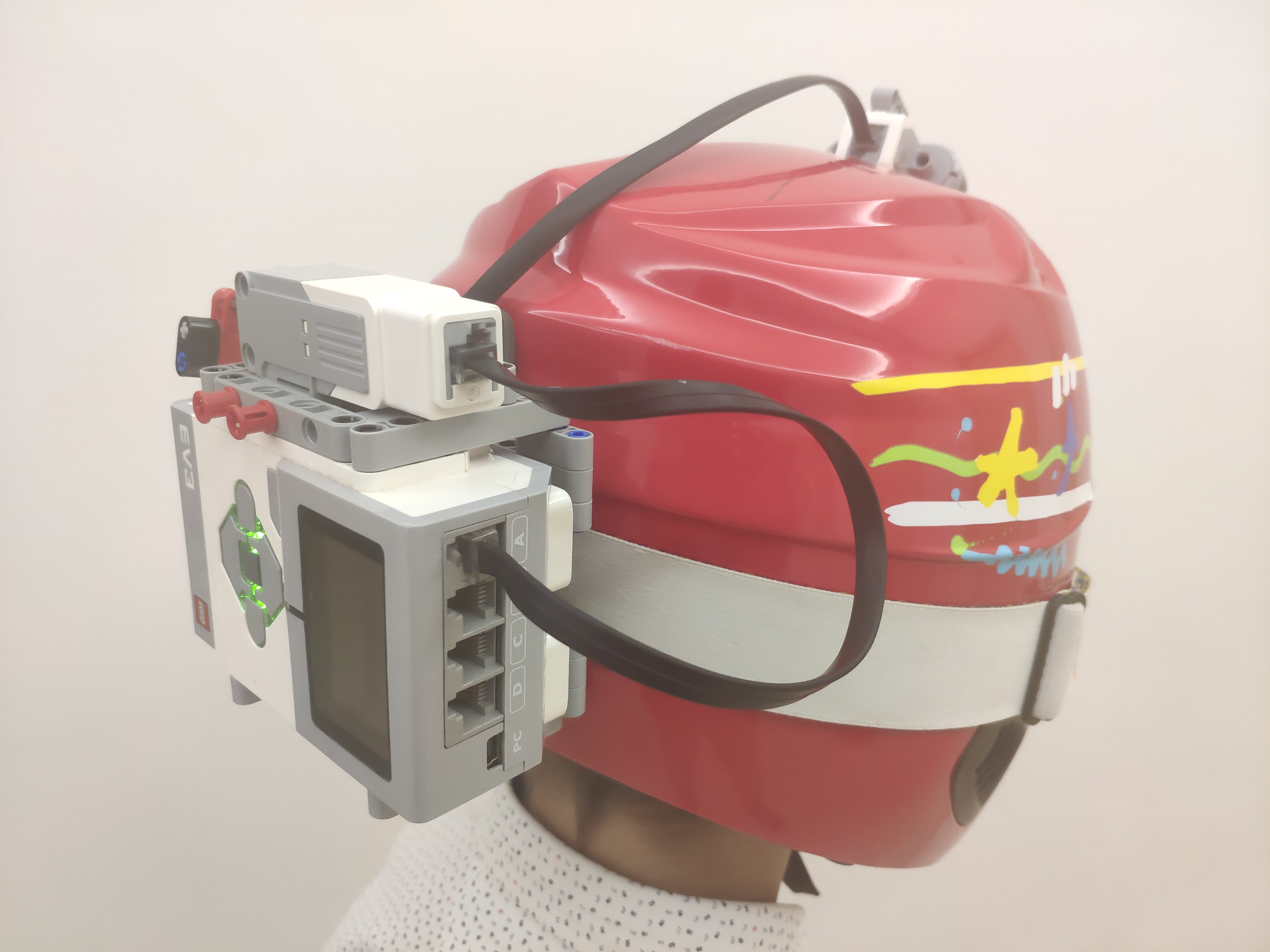
Всю конструкцию я разместил на горлолыжном шлеме. Это позволяет пользователю легко и точно надеть робота, и получать информацию о препятствиях в направлении взгляда. Руки остаются свободными.
Киберсобака работает в двух режимах, которые переключаются кнопками влево/вправо. Самое простое решение было перевести информацию о расстоянии до препятствия в высоту звука, как парктроник автомобиля. Чем ближе подходим, тем выше тон.
Но я больше узнал о том, как слепые люди воспринимают мир, и оказалось, что для них окружающие звуки очень важны. Голоса людей, шум машин, стук шагов им тоже дают информацию. И плохо, что робот будет им мешать слышать эти звуки. Тогда я придумал второй режим - вибрационный. Он отдаёт информацию о расстоянии через осязание с помощью мотора со смещенным центром тяжести.
Алгоритм
В бесконечном цикле робот:
1. Проверяет, не нажата ли кнопка переключения режима (влево-звуковой, вправо-вибрационный)
2. Для звукового режима считает частоту по формуле 64000/расстояние в см, издаёт писк на время 0.01 секунды.
3. Для вибрационного режима робот делает задержку на (расстояние/400) секунды, и, если расстояние меньше 240 см, поворачивает мотор на 10 градусов с полной мощностью и резко останавливает его, создавая вибрацию.
Будущее
Чтобы это устройство распространить слепым, я планирую
1. Сделать этого робота готовым к массовому производству, переделав всё на Arduino. Он будет дешёвым, легким, и будет есть меньше электричества.
2. Обратиться во Всероссийское общество слепых, найти экспертов и тестовых пользователей, попробовать и отладить устройство для реальных пользователей, найти финансирование для производства.
Файлы
Добавлен 10.12.2024
Добавлен 10.12.2024
Добавлен 10.12.2024
Добавлен 10.12.2024
Дополнительные файлы
{kind=link}
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024