- Автономный футбол WRO
- Кубок РТК – Искатель
- Свободная творческая категория
- Гонки балансирующих роботов
- Полоса препятствий
- Защита электротехнических проектов
- Электротехническая олимпиада
- Олимпиада по техническому 3D моделированию
- Эстафета-2
- Cледование по линии для продолжающих BEAM (Аналоговые роботы)
- Траектория: противостояние
- Полоса препятствий: ScratchDuino и микроконтроллеры
- Пирамида
- Кегельринг-макро
- Кубок РТК – Экстремал
- Гуманоидное сумо
- Блиц турнир по 3D моделированию
- Линия-профи
- Навигация
- Гонки андроидных роботов

1 . Автономный футбол WRO
В автономном футболе роботов от настоящего футбола осталось немногое. Поле состоит из нескольких оттенков зеленого и белое полосы аута по периметру. Соревнуются две команды по два робота в каждой. В отличие от управляемого футбола, здесь запрещено какое либо взаимодействие между роботами и людьми, однако же, между собой роботы могут обмениваться информацией (например, о положении мяча). Однако же, несмотря на столь больше отличия от большого футбола, цель состязания остается прежней - оставить мяч в воротах противника наибольшее количество раз.
Год рождения участников: без ограничений
2 . Кубок РТК – Искатель
В соревнованиях «Кубок ЦНИИ РТК» робот должен за отведенное время преодолеть полосу препятствий. Во время прохождения стенда робот должен собрать специальные «банки», расставленные по полигону, и расположить в специальных цветовых зонах, соответствующих цвету «банки».
Полигон представляет реконфигурируемую полосу препятствий, составными элементами которой являются типовые виды препятствий, на преодоление которых должен быть рассчитан мобильный робот.
Номинация "Искатель" проходит в режиме управления роботом, находящимся в зоне видимости оператором.
Год рождения участников: без ограничений

3 . Свободная творческая категория
Участники вольны придумывать роботов, для которых нет никаких ограничений в заданиях, целях и правилах. Создателей ограничивает лишь их собственный полет фантазии. А победитель определяется несколькими судьями по нескольким параметрам: Актуальность, Новизна, Техническая сложность, Работоспособность, Презентация, Эстетика.
Год рождения участников: без ограничений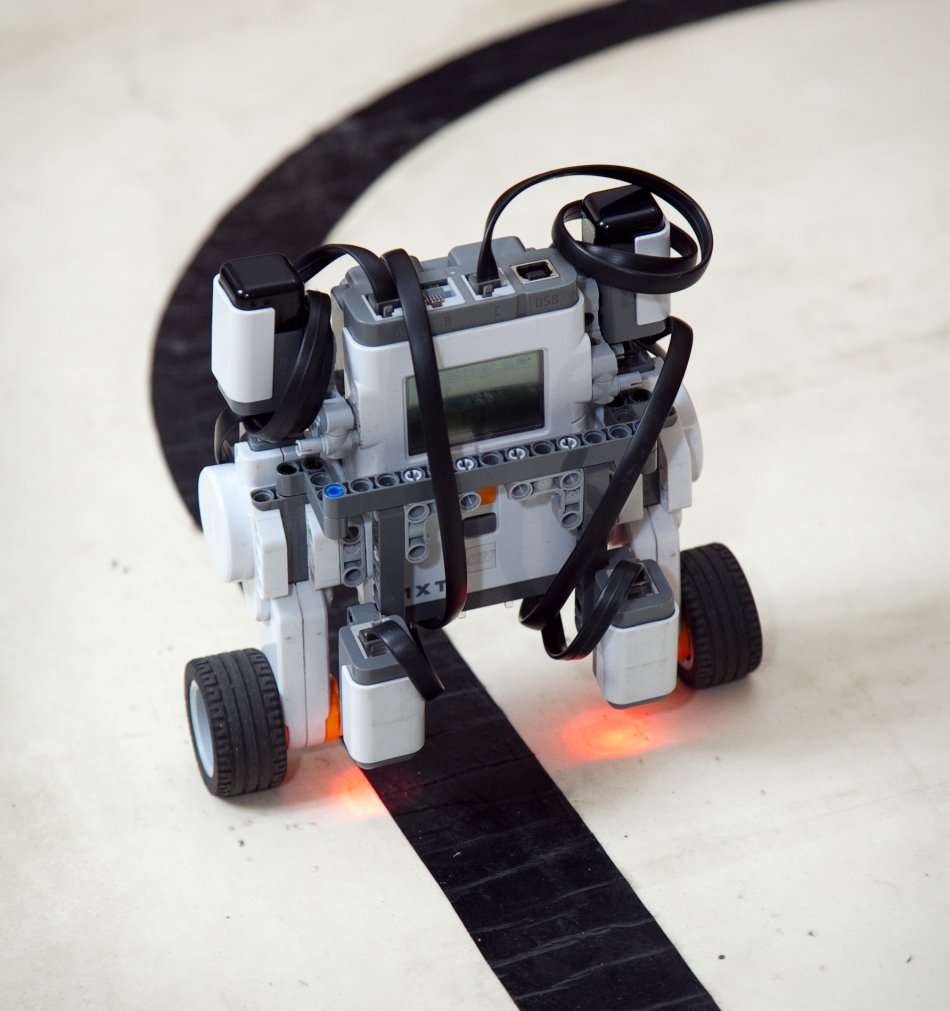
4 . Гонки балансирующих роботов
Сигвеи - это роботы, использующие для передвижения всего два колеса. Роботы - сигвеи должны преодолеть полосу препятствий за наименьшее время. В зависимости от категории, робот может быть как автономным, так и управляемым. На Открытых состязаниях Санкт-Петербурга по робототенике 2016 будет проводиться только категория "Автомное управление".
Год рождения участников: без ограничений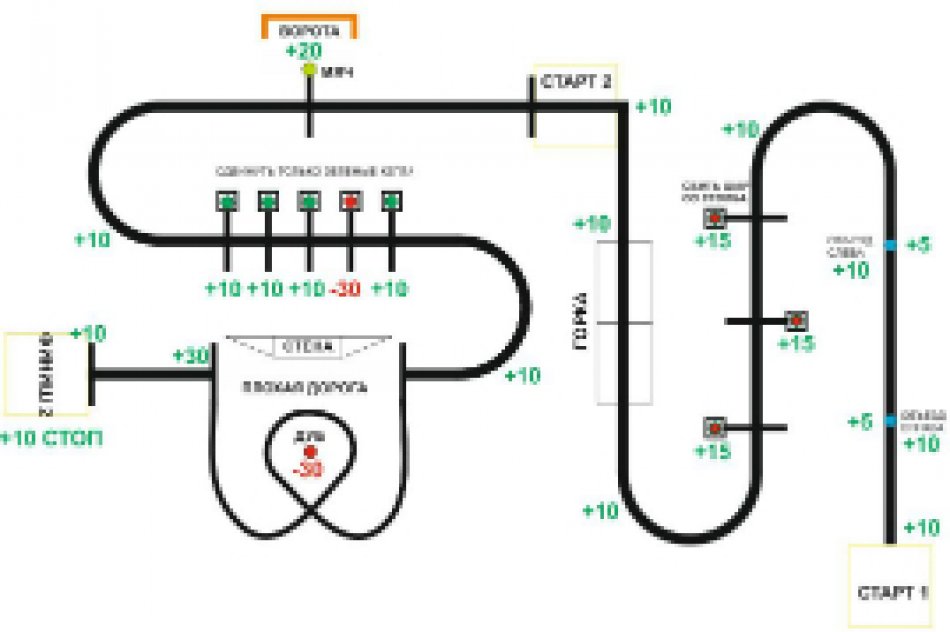
5 . Полоса препятствий
Цель робота - пройти от старта до финиша, преодолев все наибольшее количество препятствий, встречающихся у него на пути.
Год рождения участников: без ограничений6 . Защита электротехнических проектов
Год рождения участников: без ограничений
7 . Электротехническая олимпиада
Участникам олимпиады необходимо за максимально короткое время собрать работоспособную схему в соотвтествии с выданным в начале олимпиады техническим заданием.
Год рождения участников: без ограничений8 . Олимпиада по техническому 3D моделированию
Год рождения участников: без ограничений
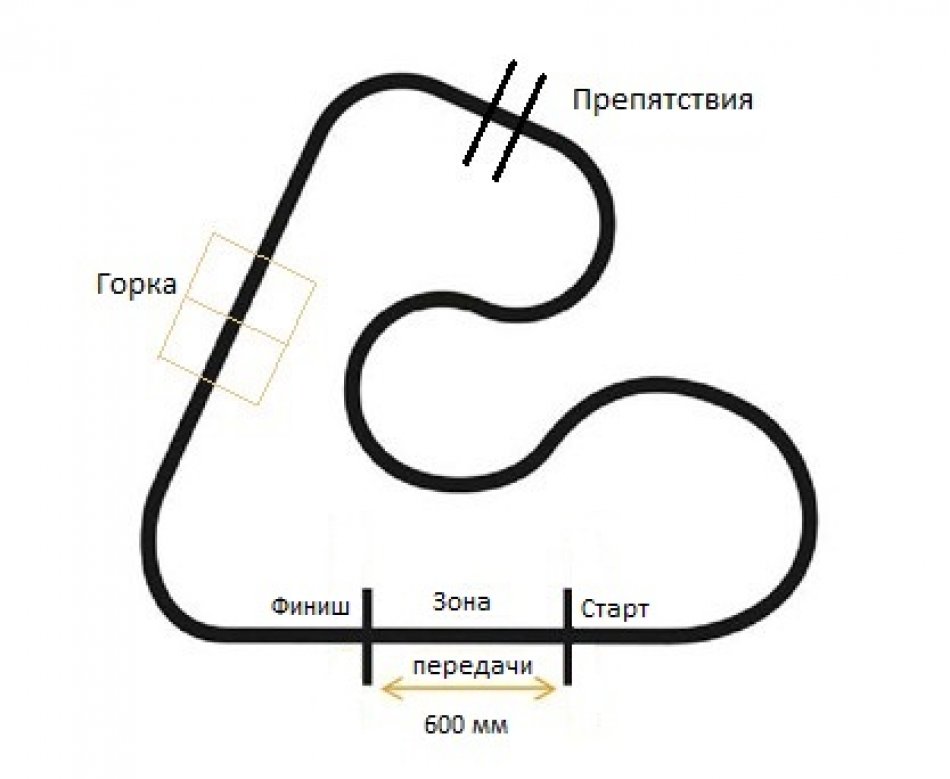
9 . Эстафета-2
За 5 минут два робота одной команды должны по очереди проехать максимальное число кругов по линии с эстафетной палочкой, каждый раз передавая ее в зоне передачи. Поле представляет собой белый полигон с черной линией, перекрестками и с припятсвиями в виде горки и бордюров.
Год рождения участников: без ограничений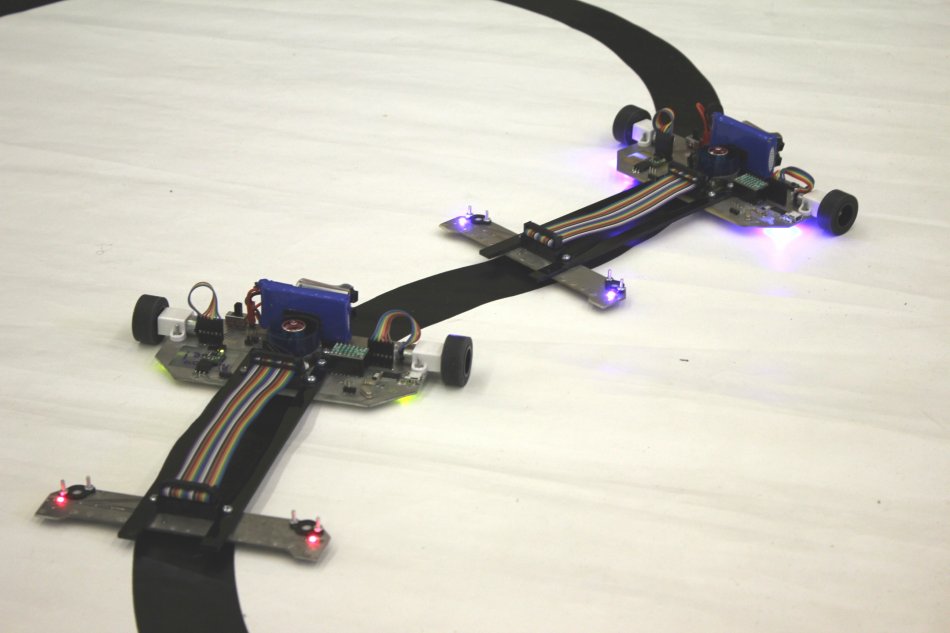
10 . Cледование по линии для продолжающих BEAM (Аналоговые роботы)
Задачей для робота в этом виде является преодоление трассы вдоль черной линии за наименьшее время. Робот должен ехать по черной линии в автоматическом режиме. Форма линии, вдоль которой двигаются роботы, усложнена по сравнению с линией для начинающих.
В этом виде соревнований могут участвовать только аналоговые BEAM-роботы.
Год рождения участников: без ограничений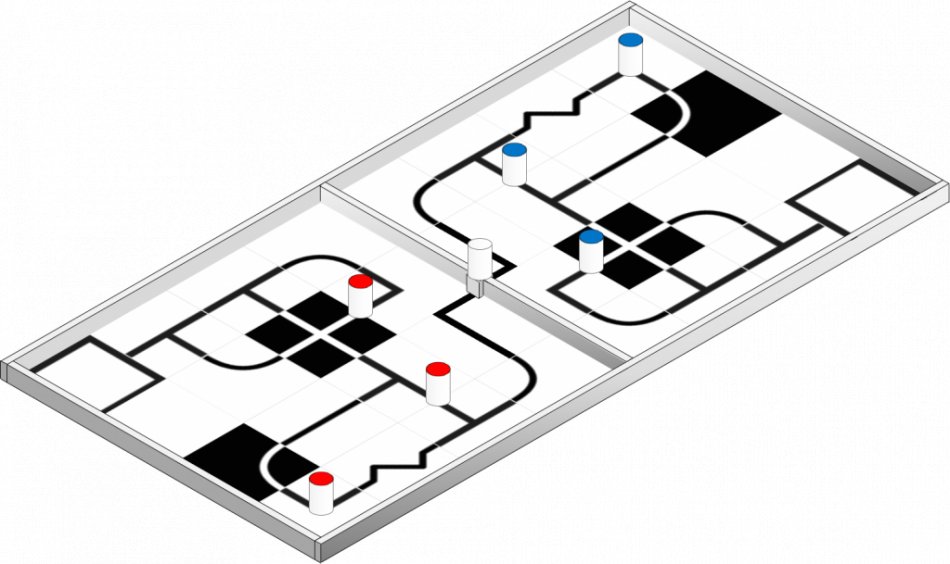
11 . Траектория: противостояние
На одном поле с траекторией соревнуются два робота: кто больше привезет банок к себе на старт. Общую на две команды банку можно привезти только последней! Кто успеет привезти ее раньше соперника?
Год рождения участников: без ограничений 12 . Полоса препятствий: ScratchDuino и микроконтроллеры
Цель робота - пройти от старта до финиша, преодолев все наибольшее количество препятствий, встречающихся у него на пути.
Год рождения участников: без ограничений13 . Пирамида
Cсоревнование пирамида направлены на то чтобы выбить детей из уютных размеров LEGO с помощью задач которые нельзя реализовать используя только его. На поле на поле одновременно 2 управляемых робота из разных команд, синей и красной. Цель роботов закидывать кубики на ярусы пирамиды высотой до 60 сантиметров. А так же уметь преодолевать различные препятствия.
Год рождения участников: без ограничений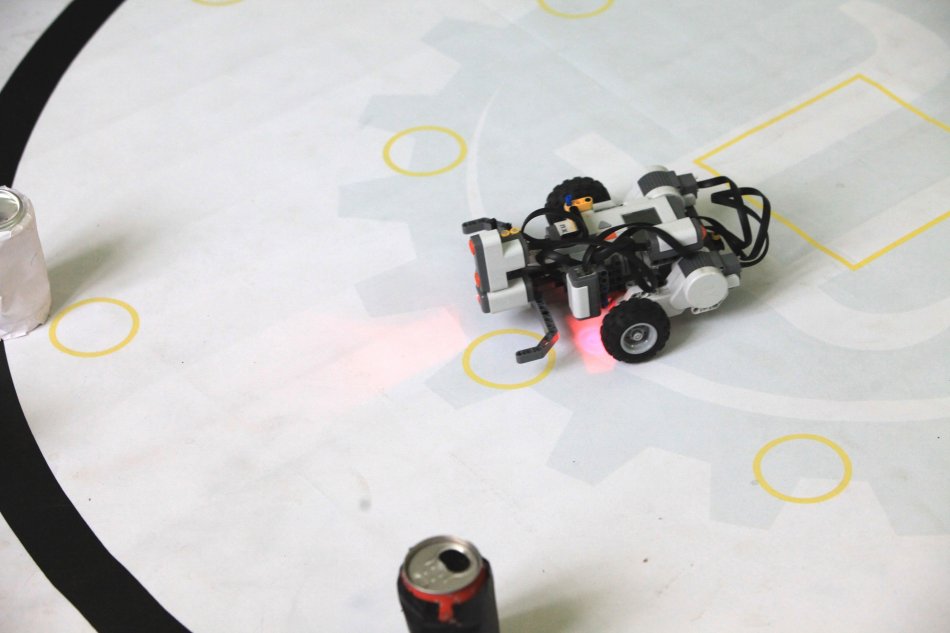
14 . Кегельринг-макро
Поле представляет собой белый круглый ринг, ограниченный черной линией. На ринге в случайном порядке расположено 8 кегель: 4 черных и 4 белых. Задача робота – за наиболее короткое время вытолкнуть все белые кегли за пределы ринга, оставив черные кегли в круге.
Год рождения участников: без ограничений
15 . Кубок РТК – Экстремал
В соревнованиях «Кубок ЦНИИ РТК» робот должен за отведенное время преодолеть полосу препятствий. Во время прохождения стенда робот должен собрать специальные «банки», расставленные по полигону, и расположить в специальных цветовых зонах, соответствующих цвету «банки».
Полигон представляет реконфигурируемую полосу препятствий, составными элементами которой являются типовые виды препятствий, на преодоление которых должен быть рассчитан мобильный робот.
Номинация "Экстремал" проходит в режиме удаленного управления роботом, когда оператор полагается только на изображение с камеры и информацию с датчиков робота.
Год рождения участников: без ограничений
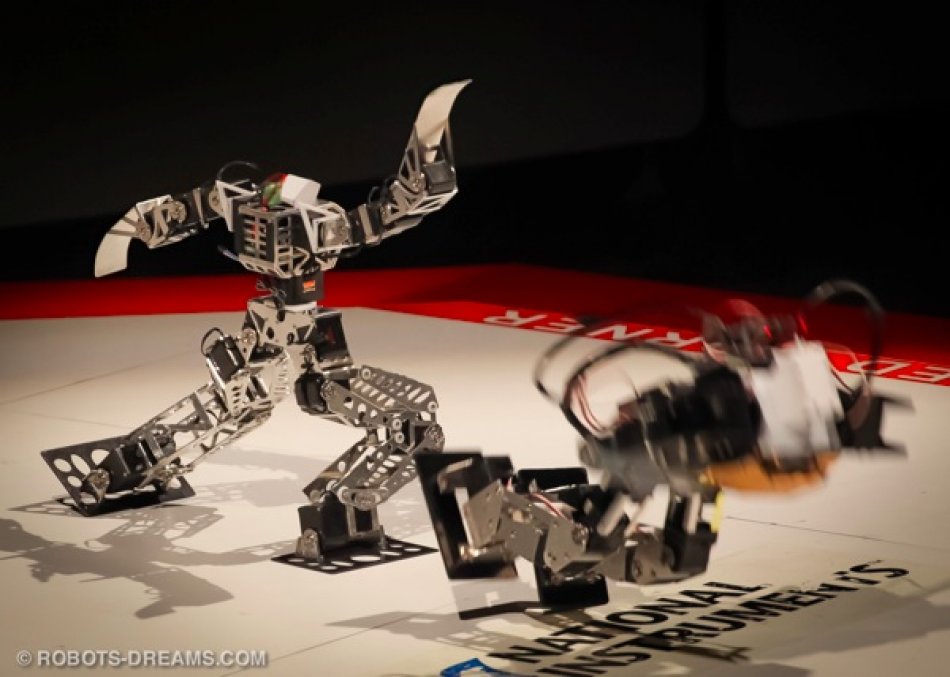
16 . Гуманоидное сумо
Состязания проходят между двумя роботами на ринге, представляющим собой черный круг с ограничительной белой линией, проходящей по периметру ринга. Цель состязания – вытолкнуть робота-противника за пределы ринга. Данная категория предназначена только для гуманоидных роботов.
Год рождения участников: без ограничений17 . Блиц турнир по 3D моделированию
Год рождения участников: без ограничений

18 . Линия-профи
Соревнования являются продолжением вида «Следование по линии» и отличается лишь тем, что черная линия заменена на полосу из однородных объектов. Задача робота остается такой же - за наиболее короткое время робот, должен добраться от места старта до места финиша.
Год рождения участников: без ограничений19 . Навигация
Год рождения участников: без ограничений

20 . Гонки андроидных роботов
Полигон представляет собой коридор, по которому человекоподобный робот должен пройти за наименьшее количество времени. Робот в данном виде состязания должен представлять собой двуногого шагающего гуманоида, способного перемещать свой центр масс для поддержания равновесия во время ходьбы.
Год рождения участников: без ограничений