- Полоса препятствий
- Следование по линии для продолжающих: Высшая лига
- Эстафета-2
- Гонки балансирующих роботов
- Выставка творческих проектов (средняя категория)
- Блиц турнир по 3D моделированию
- Пирамида
- Автономный футбол WRO
- Навигация
- Защита электротехнических проектов
- Кубок РТК: Искатель 1.0 (Лагерь 2016)
- Кубок РТК: Экстремал 1.0 (Лагерь 2016)
- Следование по линии RobotChallenge
1 . Полоса препятствий
Цель робота - пройти от старта до финиша, преодолев все наибольшее количество препятствий, встречающихся у него на пути.
Год рождения участников: без ограничений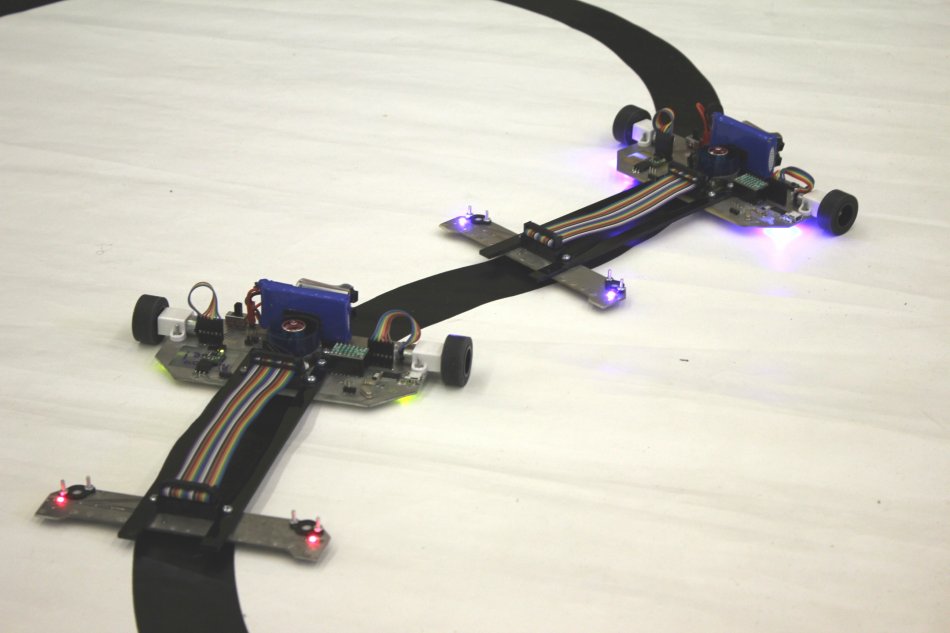
2 . Следование по линии для продолжающих: Высшая лига
Данный вид предназначен для самодельных роботов и предполагает сложный уровень состязаний и высокую конкуренцию.
Задачей для робота в этом виде является преодоление трассы вдоль черной линии за наименьшее время. Робот должен ехать по черной линии в автоматическом режиме. Форма линии, вдоль которой двигаются роботы, усложнена по сравнению с линией для начинающих.
Год рождения участников: без ограничений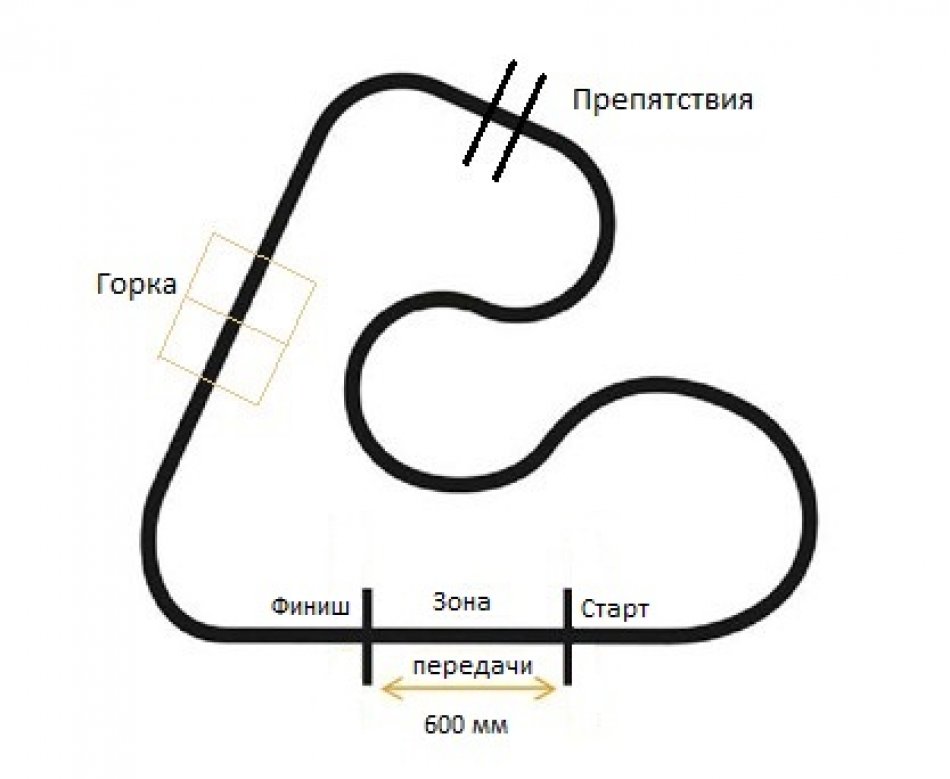
3 . Эстафета-2
За 5 минут два робота одной команды должны по очереди проехать максимальное число кругов по линии с эстафетной палочкой, каждый раз передавая ее в зоне передачи. Поле представляет собой белый полигон с черной линией, перекрестками и с припятсвиями в виде горки и бордюров.
Год рождения участников: без ограничений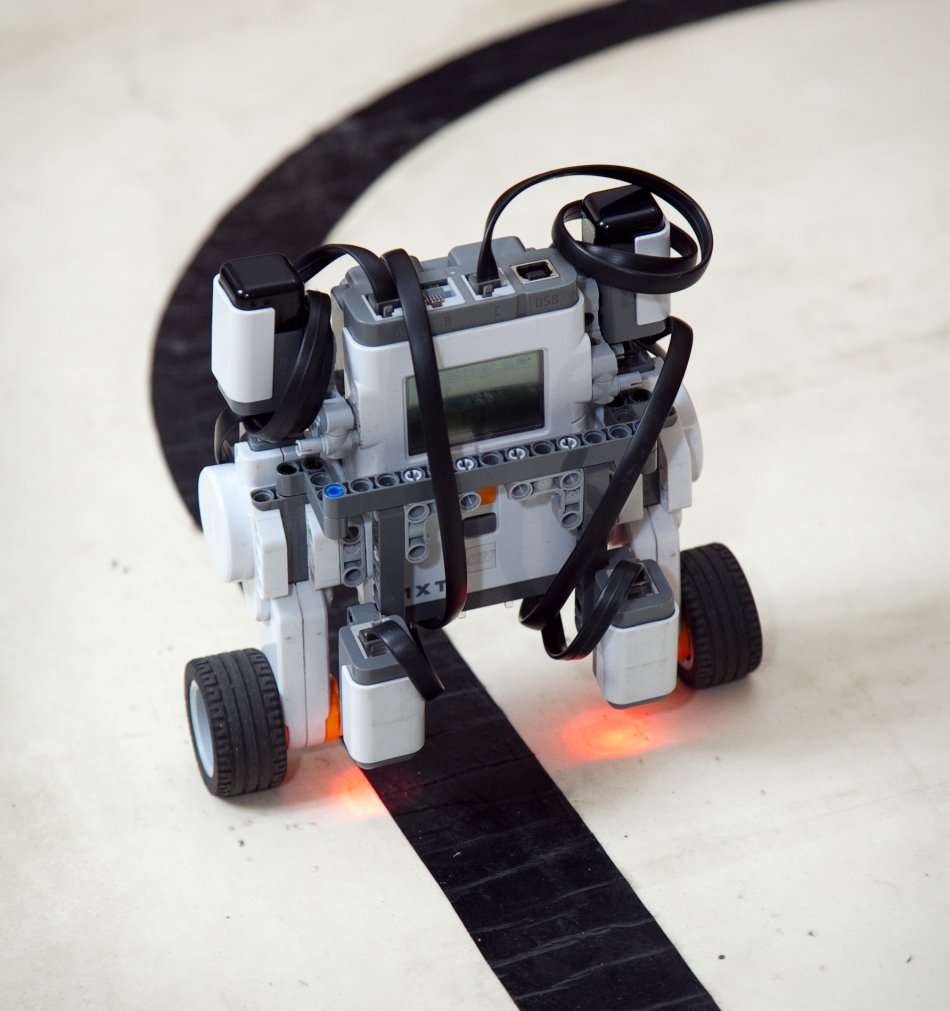
4 . Гонки балансирующих роботов
Сигвеи - это роботы, использующие для передвижения всего два колеса. Роботы - сигвеи должны преодолеть полосу препятствий за наименьшее время. В зависимости от категории, робот может быть как автономным, так и управляемым. На Открытых состязаниях Санкт-Петербурга по робототенике 2016 будет проводиться только категория "Автомное управление".
Год рождения участников: без ограничений
5 . Выставка творческих проектов (средняя категория)
Участники вольны придумывать роботов, для которых нет никаких ограничений в заданиях, целях и правилах. Создателей ограничивает лишь их собственный полет фантазии. А победитель определяется несколькими судьями по нескольким параметрам: Актуальность, Новизна, Техническая сложность, Работоспособность, Презентация, Эстетика. Возрастная категория — от 13 до 15 лет.
Год рождения участников: без ограничений6 . Блиц турнир по 3D моделированию
Год рождения участников: без ограничений
7 . Пирамида
Cсоревнование пирамида направлены на то чтобы выбить детей из уютных размеров LEGO с помощью задач которые нельзя реализовать используя только его. На поле на поле одновременно 2 управляемых робота из разных команд, синей и красной. Цель роботов закидывать кубики на ярусы пирамиды высотой до 60 сантиметров. А так же уметь преодолевать различные препятствия.
Год рождения участников: без ограничений
8 . Автономный футбол WRO
В автономном футболе роботов от настоящего футбола осталось немногое. Поле состоит из нескольких оттенков зеленого и белое полосы аута по периметру. Соревнуются две команды по два робота в каждой. В отличие от управляемого футбола, здесь запрещено какое либо взаимодействие между роботами и людьми, однако же, между собой роботы могут обмениваться информацией (например, о положении мяча). Однако же, несмотря на столь больше отличия от большого футбола, цель состязания остается прежней - оставить мяч в воротах противника наибольшее количество раз.
Год рождения участников: без ограничений9 . Навигация
Год рождения участников: без ограничений
10 . Защита электротехнических проектов
Год рождения участников: без ограничений

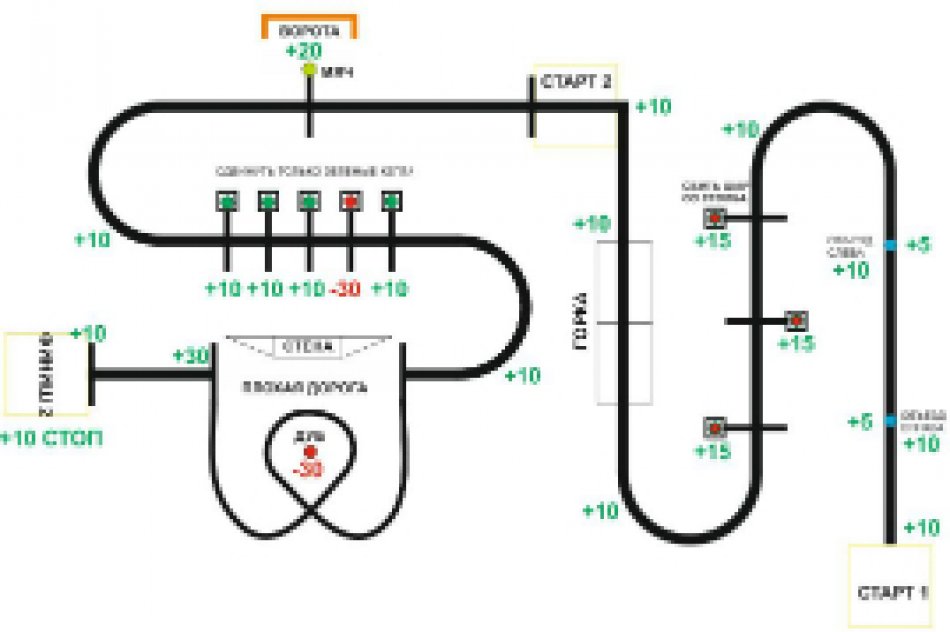
11 . Кубок РТК: Искатель 1.0 (Лагерь 2016)
В соревнованиях «Кубок РТК» робот должен за отведенное время преодолеть полосу препятствий. Во время прохождения стенда робот должен собрать цветные маяки, расставленные по полигону, и расположить в соответствующих цветовых зонах, а также пройти некоторые участки в автономном режиме.
Полигон представляет реконфигурируемую полосу препятствий, составными элементами которой являются типовые виды препятствий, на преодоление которых должен быть рассчитан мобильный робот.
В номинации «Искатель 1.0» робот находится в поле зрения оператора, тот может непосредственно наблюдать за действиями робота своими глазами, либо с внешних камер наблюдения, расположенных на полигоне. Управление роботом также осуществляется дистанционно.
Год рождения участников: без ограничений
12 . Кубок РТК: Экстремал 1.0 (Лагерь 2016)
В соревнованиях «Кубок РТК» робот должен за отведенное время преодолеть полосу препятствий. Во время прохождения стенда робот должен собрать цветные маяки, расставленные по полигону, и расположить в соответствующих цветовых зонах, а также пройти некоторые участки в автономном режиме.
Полигон представляет реконфигурируемую полосу препятствий, составными элементами которой являются типовые виды препятствий, на преодоление которых должен быть рассчитан мобильный робот.
Номинация «Экстремал 1.0» проходит в режиме удаленного управления роботом, когда оператор полагается только на изображение с камеры и информацию с датчиков робота.
Год рождения участников: без ограничений
13 . Следование по линии RobotChallenge
Задачей для робота в этом виде является преодоление трассы вдоль черной линии за наименьшее время. Робот должен ехать по черной линии в автоматическом режиме. Главное отличие от предыдущих категорий заключается в измененной ширине линии.
Год рождения участников: без ограничений